基于MATLAB/Simulink的乐高自平衡机器人NXTway-GS设计详解
需积分: 9 92 浏览量
更新于2024-07-17
收藏 2.88MB PDF 举报
NXTway-GS Model-Based Design 是一份专注于使用MATLAB/Simulink平台进行模型驱动设计的详细指南,它聚焦于开发一款基于LEGO Mindstorms NXT构建的双轮自平衡机器人。这份文档由Yorihisa Yamamoto撰写,作为Cybernet Systems Co., Ltd.应用工程部门高级支持组的一员,他在设计过程中不断迭代和完善,从最初的版本到1.4,包含了控制器模型、运动方程的修改、固定点控制器的添加、一般化力的调整以及仿真电影的增加。
在第一版(1.0)中,作者介绍了自平衡机器人的基本概念和设计理念,使用LEGO Mindstorms NXT组件构建的硬件与软件系统相结合,旨在实现机器人在虚拟环境中的稳定行驶。随着后续版本的更新,文档内容更加深入,包括对控制策略的优化,如固定点控制器模型的加入,以提高机器人的实时性能。
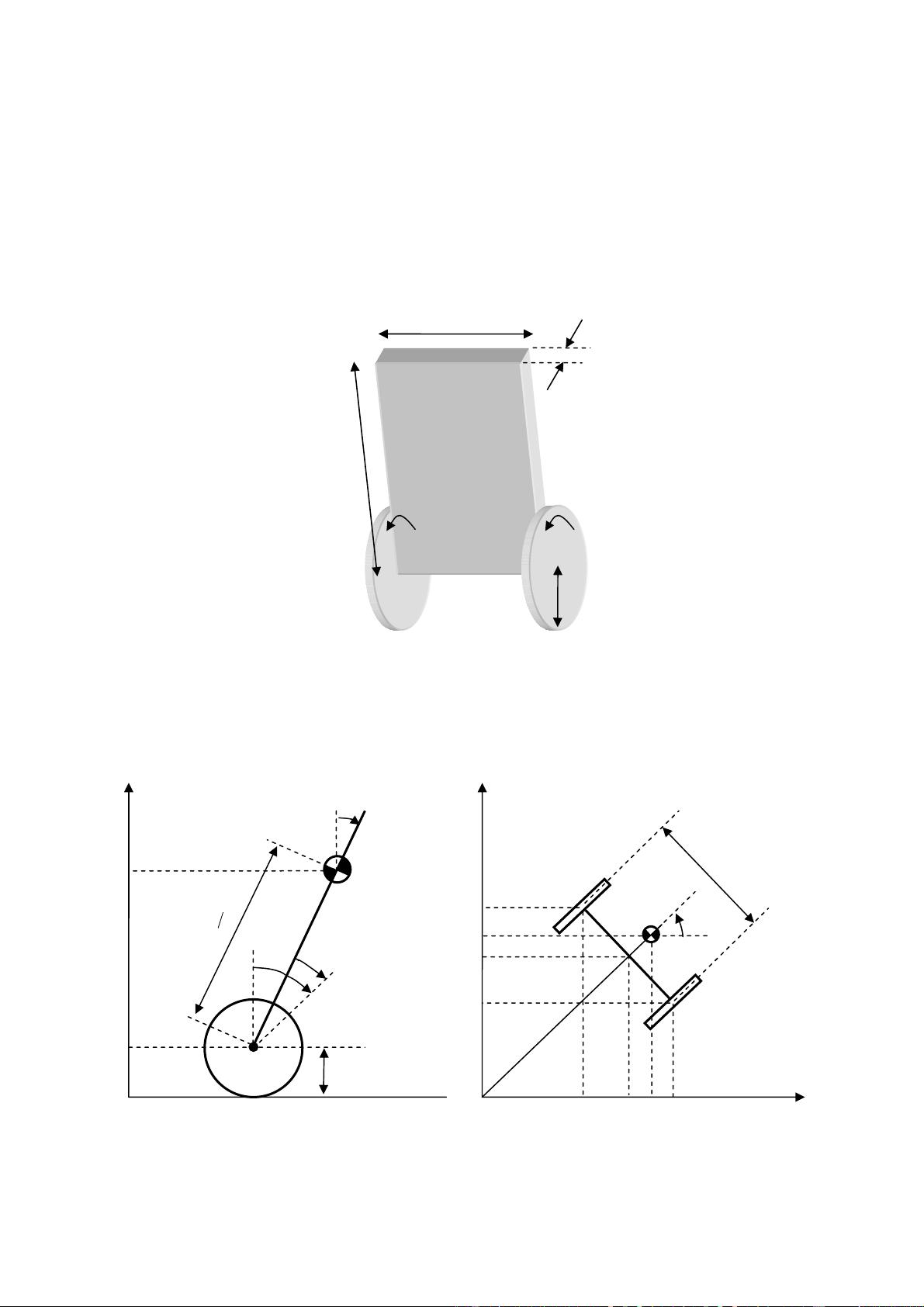
在模型设计部分,文档详细讲解了如何利用MATLAB/Simulink环境建立数学模型,包括运动方程和状态方程的设定,这些模型是实现机器人动态平衡的关键。通过这些数学模型,设计者能够模拟机器人的行为,预测其在各种条件下的运动响应,并对控制算法进行测试和调整,以确保在实际硬件上的有效性和鲁棒性。
固定点控制器模型的引入(1.1版)允许设计者更好地处理模拟和实际执行之间的转换,减少数字信号处理中的量化误差,提高了系统的精度和效率。运动方程的修改可能反映了对机器人物理特性的新理解或对环境因素的考虑,使得模型更贴近实际操作。
在1.3版,作者对模型进行了进一步的改进,包括一般化力的更新和状态变量的调整,这可能涉及到对机器人负载、摩擦系数等参数的考虑,以提升模型的适用性和精确性。同时,添加的仿真电影可以帮助读者直观地理解模型的工作原理和机器人在不同情况下的行为。
最后一版(1.4)主要涉及文本内容的修订,可能是为了清晰度、一致性或最新研究成果的更新。文档强调,所有内容和提供的URL可能会根据需要未经通知而进行更改,体现了持续学习和发展的重要性。
NXTway-GS Model-Based Design是一份实用的教程,涵盖了从理论设计到实际应用的全过程,对于那些想要了解并实践基于模型的设计方法,特别是针对LEGO Mindstorms NXT平台的自平衡机器人项目的学生和工程师来说,具有很高的参考价值。通过这份文档,读者不仅能掌握MATLAB/Simulink工具的运用,还能学习到关键的系统建模和控制策略优化技巧。

- 5 -
The reference [1] illustrates many properties about DC motor. Generally speaking, sensors and actuators are
different individually. Especially, you should note that gyro offset and gyro drift have big impact on balance
control. Gyro offset is an output when a gyro sensor does not rotate, and gyro drift is time variation of gyro
offset.

剩余72页未读,继续阅读
2021-05-30 上传
2019-08-21 上传
2019-11-21 上传
2022-09-24 上传
2019-10-17 上传
2022-05-16 上传
2022-04-09 上传
2022-05-16 上传

今夜天晴
- 粉丝: 36
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
