无线传感器与执行器网络:研究挑战与协同机制
"本文主要探讨了无线传感器和执行器网络(WSANs)的研究挑战,由Ian F. Akyildiz和Ismail H. Kasimoglu在2004年发表。无线传感器和执行器网络是一种由无线介质连接的传感器和执行器集合,用于执行分布式感应和操作任务。这种网络需要满足传感器和执行器共存所带来的需求。"
在无线传感器和执行器网络中,传感器负责收集物理环境的数据,而执行器根据这些数据做出决策并执行相应的动作,使得用户能够远程有效地感知和作用。为了提供有效的感应和操作,传感器和执行器之间需要协调机制。此外,为了确保执行动作时数据的正确性和及时性,传感器数据必须在执行时保持有效。
该论文深入研究了传感器-执行器以及执行器-执行器之间的协调问题,这些协调对于网络的性能至关重要。它可能涵盖了如何设计有效的通信协议、能量管理和节能策略,因为传感器和执行器通常具有有限的电源。此外,网络的可靠性和安全性也是重要的研究方向,因为WSANs可能应用于关键领域,如环境监测、军事防御或工业自动化,其中数据的准确性、隐私和网络的完整性是至关重要的。
WSANs还面临着网络拓扑控制、路由算法设计、数据融合和处理、以及资源分配的挑战。传感器节点可能需要通过多跳通信将数据传输到执行器,因此需要高效的数据传输策略来减少延迟和提高能效。同时,执行器的决策过程可能需要整合来自多个传感器的冗余或互补信息,这涉及到复杂的数据融合技术。
在安全方面,WSANs需要抵御各种攻击,包括节点篡改、拒绝服务攻击以及恶意软件。因此,安全协议和加密机制的设计是必不可少的。此外,考虑到网络的动态性和自组织性,适应性强的自我修复和容错机制也非常重要。
无线传感器和执行器网络的研究挑战涉及网络架构设计、通信协议、能源管理、数据处理、安全性和可靠性等多个方面。解决这些问题将推动WSANs技术的发展,使其在各种实际应用中发挥更大的潜力。
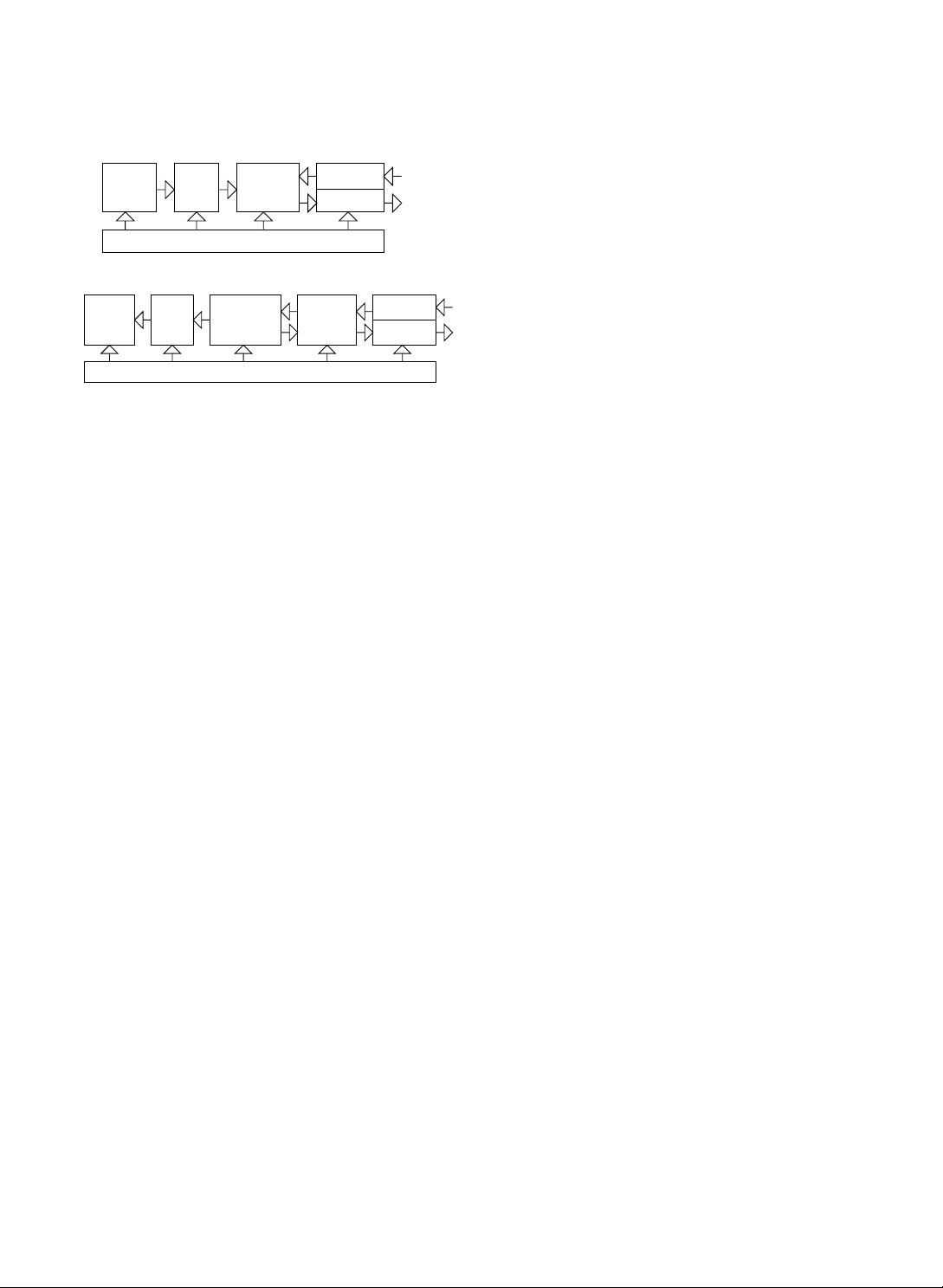
and (b), respectively. Sensor nodes are equipped
with power unit, communication subsystems (re-
ceiver and transmitter), storage and processing re-
sources, Analog to Digital Converter (ADC) and
sensing unit, as shown in Fig. 3(a). The sensing
unit observes phenomena such as thermal, optic
or acoustic event. The collected analog data are
converted to digital data by ADC and then are
analyzed by a processor and then transmitted to
nearby actors.
The decision unit (controller) functions as an
entity that takes sensor readings as input and gen-
erates action commands as output. These action
commands are then converted to analog signals
by the Digital to Analog Converter (DAC) and
are transformed into actions via the actuation unit
as shown in Fig. 3(b).
In some applications, integrated sensor/actor
nodes may replace actor nodes. Since an integrated
sensor/actor node is capable of both sensing and
acting, it has sensing unit and ADC in addition
to all components of an actor node shown in
Fig. 3(b).
One of the examples for an integrated sensor/
actor node is a robot. However, a single robot
may not have a sufficient sensing capability to
sense the entire event area. Hence, in order to ini-
tiate more reliable actions, robots (integrated sen-
sor/actor nodes) should act based on its own
sensor readings as well as on the other nearby sen-
sor nodesÕ data in the network. In other words,
sensors transmit their readings to the nearby ro-
bots which process all sensor readings including
their own sensor data. This way robots can collab-
orate with sensor nodes which provide them to
have a reliable knowledge about the overall event.
Then, the decision unit takes appropriate decisions
and the actuation unit performs actions as in an
actor node.
The use of integrated sensor/actor or actor node
does not influence the overall architecture of
WSANs. However, in most of the real applica-
tions, integrated sensor/actor nodes, especially ro-
bots, are used instead of actor nodes.
The robots designed by several Robotics Re-
search Laboratories are shown in Fig. 4(a)–(d).
Low-flying helicopter platform shown in Fig.
4(a) provides ground mapping, and air-to-ground
cooperation of autonomous robotic vehicles [24].
However, it is likely that in the near future more
several actuation functionalities such as water
sprinkling or disposing of a gas can be supported
by this helicopter platform, which will make
WSANs much more efficient than today. An
example of Robotic Mule which is called autono-
mous battlefield robot designed for the Army is gi-
ven in Fig. 4(b). There are several autonomous
battlefield robot projects sponsored by Space and
Naval Warfare Systems Command [9] and Defense
Advanced Research Projects Agency (DARPA)
[8]. These developed battlefield robots can detect
and mark mines, carry weapons, function as tanks
or maybe in the future totally replace soldiers in
the battlefield. Moreover, SKITs shown in Fig.
4(c) are networked tele-robots having a radio tur-
ret which enables communication over UHF fre-
quencies at 4800 kbits/sec [22]. These robots can
coordinate with each other by exploiting their
wireless communication capabilities and perform
the tasks determined by the application. Finally,
possibly the worldÕs smallest autonomous unteth-
ered robot (1/4 cubic inch and weighing less than
an ounce) being developed in Sandia National Lab-
oratories [20] is given in Fig. 4(d). Although it is
not capable of performing difficult tasks that are
done with much larger robots yet, it is very likely
that it will be the robot of the future. A sensor
node and a sink are given in Fig. 5. MICA is an
open-source hardware and software platform that
combines sensing, communications, and comput-
&
Power Unit
Storage
ADC
Unit
Sensing
Transmitter
Receiver
Processor
(a)
Power Unit
Transmitter
Receiver
Unit
Storage
Actuation
&
Processor
Controller
(Decision Unit)
DAC
(b)
Fig. 3. The components of (a) sensors and (b) actors.
354 I.F. Akyildiz, I.H. Kasimoglu / Ad Hoc Networks 2 (2004) 351–367
剩余16页未读,继续阅读
2021-02-09 上传
2021-02-09 上传
2021-02-20 上传
2021-04-04 上传
152 浏览量

铭清雨霖
- 粉丝: 4
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







