无传感器外力估计:基于时延估计的扰动卡尔曼滤波方法
版权申诉
191 浏览量
更新于2024-06-29
收藏 1.36MB DOCX 举报
"基于时延估计的扰动卡尔曼滤波器外力估计"
在机械臂技术的研究中,获取外力信息对于实现精确力控制至关重要,尤其是在与环境交互的任务中。传统上,力传感器被用于测量机械臂末端执行器的外力,但这增加了成本和系统复杂性,且在恶劣环境中可能影响其性能。因此,不依赖力传感器的外力估计方法成为了一个重要的研究方向。
目前,学者们提出了一系列外力估计方法。例如,文献[3]介绍的基于扰动观测器的力估计方法,通过观测器来估算外力;文献[4]则利用滑模扰动观测器,这种方法能够适应系统变化,但可能引入额外的抖动。文献[5]提出了非线性扰动观测器,然而对噪声和模型误差较为敏感,估计精度受限。文献[6]提出非线性干扰观测器来估计关节摩擦力和连杆力,无需关节加速度数据,而文献[7]将电机模型与机械臂动力学模型结合,通过电机信号来估计外力。文献[8]采用了卡尔曼滤波算法,结合电机的电流、关节角度和速度信息来估计外力和力矩,但这种方法仅适用于离线状态估计。
针对动力学建模的挑战,文献[9]开发了一种不需要精确动力学模型的机械臂估计器,利用同时输入和状态估计来抑制非线性和测量噪声。文献[10]提出时间延迟估计(TDE)方法,利用关节扭矩传感器信息在假设系统动力学短时间内不变的情况下估计外力。对于非线性随机系统,文献[11]提出了一种克服非线性不确定性的方法。文献[12]比较了不同类型的观测器,结果显示改进的扩展状态观测器在接触力估计中表现最佳。文献[13]利用电机电流测量,通过非线性最小二乘回归来识别电机参数和摩擦转矩模型,以提高力估计精度。
综合这些方法,可以看出,外力估计的研究主要集中在开发更鲁棒、精度更高的观测器和滤波器,以及减少对外部设备的依赖。时间延迟估计、扰动观测器和卡尔曼滤波等技术的应用,为解决模型误差、测量噪声和系统扰动等问题提供了有效途径。未来的研究将继续探索如何在不牺牲精度的前提下,进一步简化系统、降低成本,并增强机械臂在复杂环境中的适应能力。
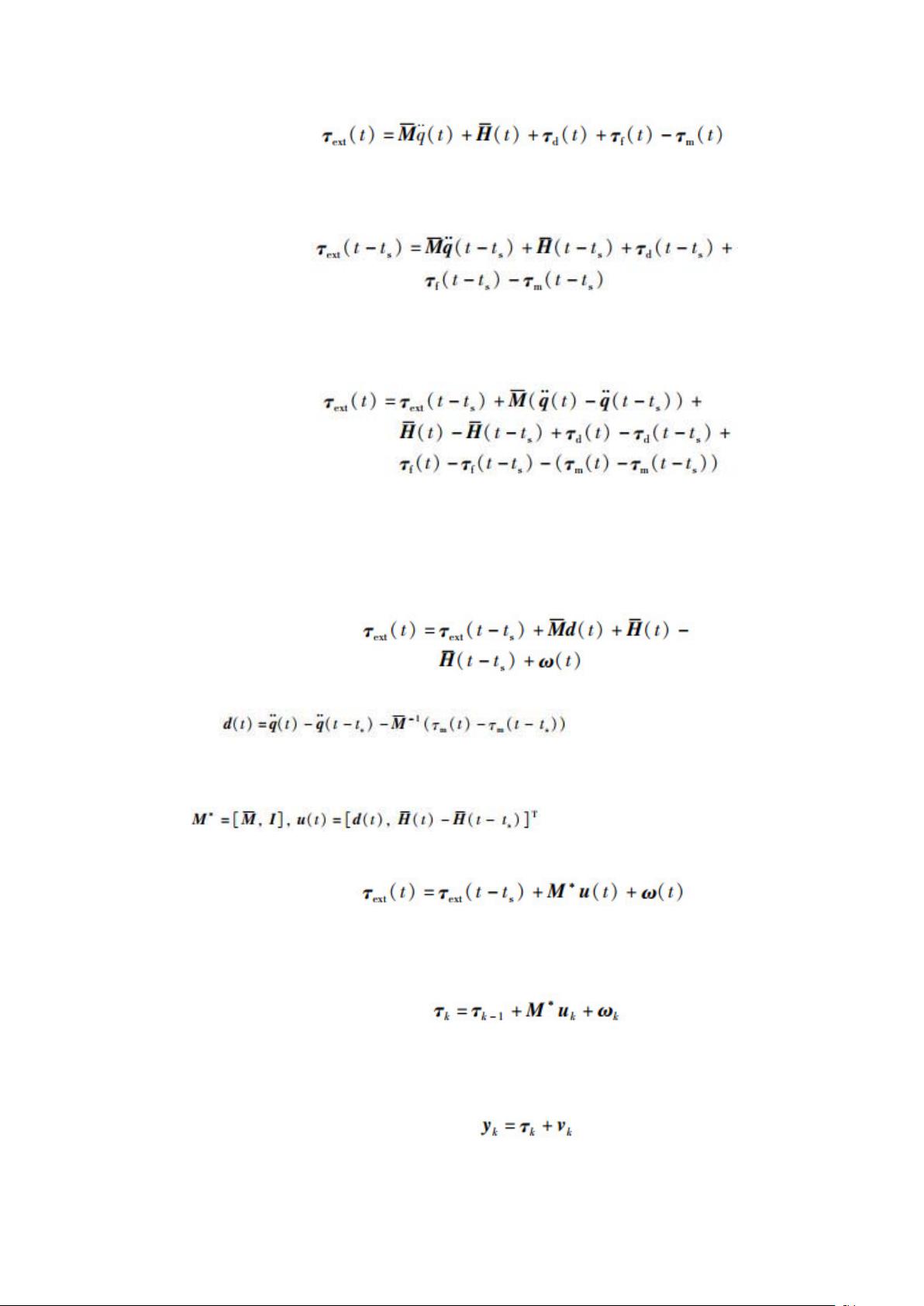
(8)
引入 t
s
作为系统的时间延迟,τ
ext
前一时刻 t-t
s
的值为
(9)
式(8)和式(9)相减得:
(10)
令 ω(t)=τ
d
(t)-τ
d
(t-t
s
)+τ
f
(t)-τ
f
(t-t
s
)为由扰动转矩、非线性不确定性等因素引起的系统噪声。
式(10)可以用式(11)代替:
(11)
式中, 表示为式(11)未知输入的函数,在
这里,外力被认为是影响机械臂运动性能的未知输入。
令 ,简化式(11)得到:
(12)
由于机械臂是由一个数字处理器控制的,如果控制器的采样时间为 t
s
,那么动态方程式(11)可变为
(13)
引入 y
k
为 k 时刻关节系统观测模型信号:
(14)
剩余19页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-14 上传
2023-02-27 上传
2024-11-01 上传
2024-11-01 上传
2022-07-13 上传
2022-11-03 上传

罗伯特之技术屋
- 粉丝: 4495
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- example-website:在以下网站发布事件的示例网站
- 学习201
- 电力设备行业:特斯拉产能加速扩建,光伏平价时代方兴未艾.rar
- TechAvailabilityBot
- whoistester WrapEasyMOnkey:查看monkeyrunner 脚本的交互jython 库-开源
- vc游戏编程库的源程序,如A*算法 A星算法 AStar自动寻路算法
- GenomicProcessingPipeline:用于处理“原始”基因组数据的管道(全基因组测序,RNA测序和靶标捕获测序)
- 行业文档-设计装置-一种制备弯曲钢绞线的装置.zip
- config-server-data
- 蓝桥杯嵌入式 mcp4017 iic
- com.tencent.mtt.apkplugin.ipai9875.zip
- kokoa-talk:带有克隆编码(HTML,CSS)
- TaTeTi:TaTeTi多人游戏(进行中)
- 下午
- the-button-clicker:自动按下 reddit 上的“按钮”的 chrome 扩展
- 行业文档-设计装置-一种切纸机的斜刀连动机构.zip
