动态窗口碰撞避免算法详解:DWA论文深度解析
需积分: 31 67 浏览量
更新于2024-07-16
收藏 581KB PDF 举报
《动态窗口方法:碰撞避免》是一篇发表在1997年4月《IEEE机器人与自动化杂志》上的论文,作者是Dieter Fox、Wolfram Burgard和Sebastian Thrun。他们都是计算机科学领域的知名学者,分别来自德国波恩大学和斯坦福大学。该文章的核心内容围绕着一种被称为Dynamic Window Approach (DWA) 的算法展开,这是一种针对移动机器人进行局部路径规划时考虑碰撞避免的重要策略。
DWA算法主要关注在实时环境中,机器人如何通过在一个动态变化的窗口内搜索安全的路径,以避开周围障碍物。它结合了速度控制和路径规划,允许机器人在有限的时间内评估和选择最安全的移动方向。算法的关键步骤包括:
1. **局部路径规划**:使用数学模型(如贝塞尔曲线或Spline)生成一组可能的未来轨迹,这些轨迹覆盖了机器人在给定时间内的各种速度和方向。
2. **动态窗口定义**:根据机器人的当前速度和传感器数据,动态地确定一个可行的路径空间,排除潜在碰撞的可能性。窗口大小会随着速度的变化而调整,以适应不同情况下的安全性需求。
3. **概率评估**:对每个可能的路径进行概率评估,考虑到传感器读数的不确定性,预测每条路径与障碍物碰撞的可能性。
4. **决策过程**:基于概率评估结果,选择具有最低碰撞风险的路径作为当前的运动指令。
5. **迭代优化**:在执行过程中不断更新窗口,根据新的传感器信息和环境反馈调整路径规划,确保持续的安全性。
这篇论文不仅提供了理论基础和详细公式推导,还包含了实际的测试说明和注意事项,以确保读者能够理解和应用DWA算法于实际的机器人系统中。由于该算法的成功应用,自1997年以来,已经被引用了超过1500次,显示出其在移动机器人领域的重要性和影响力。
三位作者的工作还包括其他相关项目,如FlourishView项目(可能是视觉导航或自主驾驶的研究)、Kinodynamic Motion Planning for Mobile Robots Using Splines(基于Spline的移动机器人动力学路径规划)等,展现了他们在机器人技术领域的广泛贡献。
《动态窗口方法:碰撞避免》是一篇深入研究并实践了机器人路径规划中碰撞避免策略的论文,对于理解移动机器人在复杂环境中的动态决策和安全性至关重要。
global model is usually to o expensive to b e done repeatedly.
Local or reactive approaches, on the other hand, use only a small fraction of the world
model, to generate rob ot control. This comes at the obvious disadvantage that they
cannot pro duce optimal solutions. Lo cal approaches are easily trapp ed in lo cal minima
(such as U-shap ed obstacle congurations). However, the key advantage of local tech-
niques over global ones lies in their low computational complexity, which is particularly
important when the world mo del is updated frequently based on sensor information. For
example, potential eld methods, as prop osed by [7], determine the steering direction by
(hypothetically) assuming that obstacles assert negative forces on the robot, and that the
target lo cation asserts a positive force. These metho ds are extremely fast, and they typi-
cally consider only the small subset of obstacles close to the robot. Borenstein and Koren
[8] identied that such methods often fail to nd tra jectories between closely spaced ob-
stacles; they also can pro duce oscillatory behavior in narrow corridors. In [2], the
vector
eld histogram
approach is prop osed, which extends the previously developed
virtual force
eld histogram
[1]. This approach uses an occupancy grid representation for mo deling the
robot's environment, which is generated and updated continuously using ultrasonic prox-
imity sensors. Occupancy information is transformed into a histogram description of the
free space around the robot, which is used to compute the motion direction and velocity
for the rob ot. In [12] a metho d similar to ours has been prop osed which, according to
Simmons, has b een developed later but indep endently. As noted above, lo cal metho ds
are typically very fast, and they quickly adapt to unforeseen changes in the environment.
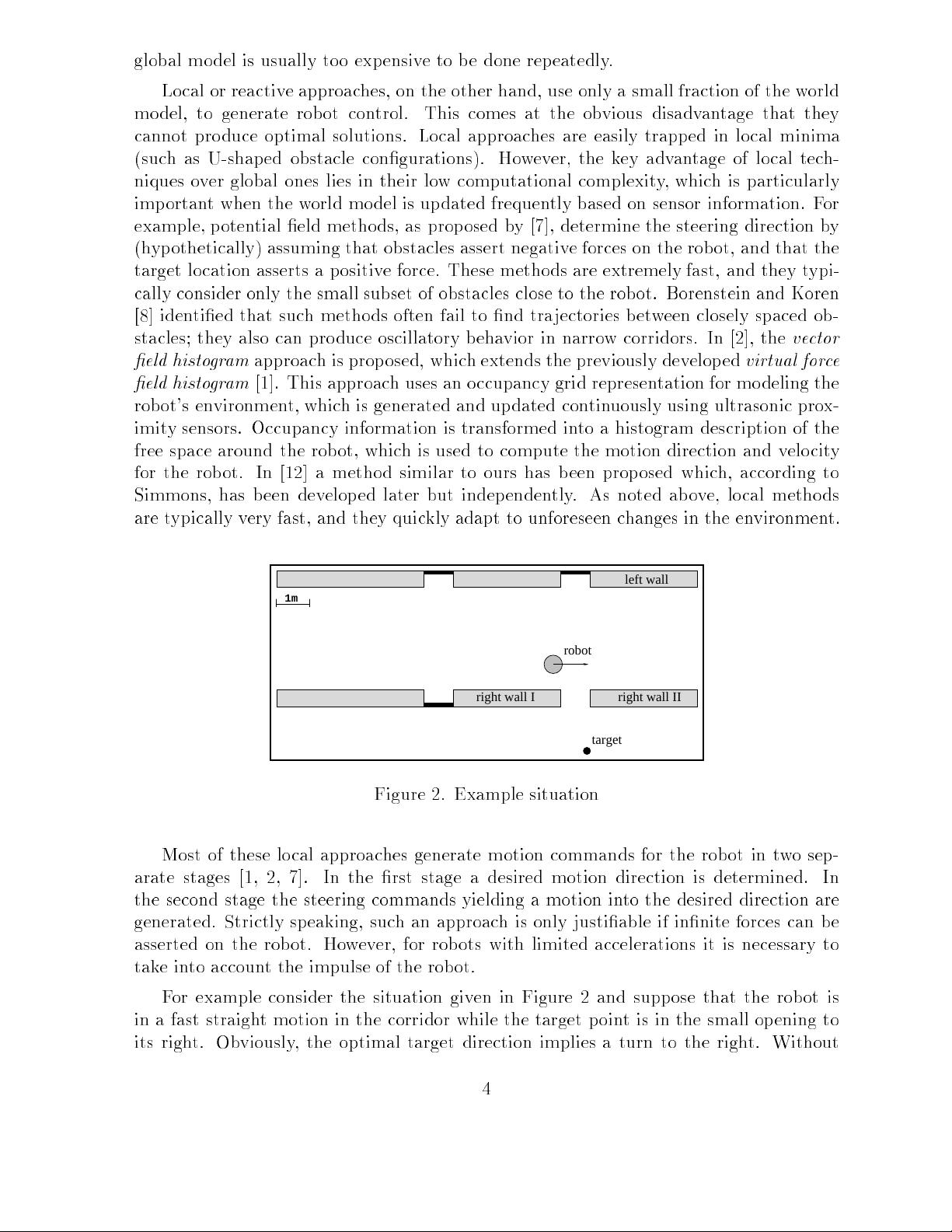
1m
robot
target
right wall I right wall II
left wall
Figure 2. Example situation
Most of these lo cal approaches generate motion commands for the rob ot in two sep-
arate stages [1, 2, 7]. In the rst stage a desired motion direction is determined. In
the second stage the steering commands yielding a motion into the desired direction are
generated. Strictly sp eaking, such an approach is only justiable if innite forces can be
asserted on the rob ot. However, for rob ots with limited accelerations it is necessary to
take into account the impulse of the robot.
For example consider the situation given in Figure 2 and suppose that the rob ot is
in a fast straight motion in the corridor while the target p oint is in the small opening to
its right. Obviously, the optimal target direction implies a turn to the right. Without
4
剩余23页未读,继续阅读
2018-07-12 上传
2024-02-26 上传
2024-11-19 上传
2024-11-19 上传
2024-11-19 上传
2024-11-19 上传
2024-11-19 上传

hjk61314
- 粉丝: 24
- 资源: 11
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
