多超声传感器模糊避障算法提升移动机器人安全性
需积分: 31 138 浏览量
更新于2024-09-13
3
收藏 194KB PDF 举报
移动机器人的超声模糊避障算法是一项旨在提高移动机器人环境感知和避障能力的关键技术。超声传感器因其成本低、实现方便和成熟的技术特性,被广泛应用于移动机器人中进行障碍检测。然而,这些传感器的一大问题是存在幻影效应,即在特定角度下,可能会接收到虚假的反射信号,误导机器人判断,导致避障失败。
该论文针对这一问题,提出了一个创新的模糊避障算法。核心思路是将多个超声传感器按照左右对称的方式布置,通过模糊逻辑处理,有效地整合和解析传感器数据。当机器人接收到的信号显示障碍物在右侧时,算法会根据模糊规则决定向左转动,反之则向右。这种设计巧妙地利用了多传感器融合的优势,减少了单一传感器带来的误判可能性。
模糊算法在此处的应用在于其能够处理不确定性和不精确性,使得机器人在面对复杂环境和幻影干扰时,能够做出更为稳健的决策。通过模糊推理,即使存在模糊边界或数据噪声,算法也能找到一个合适的中间状态,避免过于极端的反应。
实验结果显示,该算法在实际运行中展现出良好的避障效果,能够在保持机器人安全的同时,有效地避免因幻影干扰而产生的碰撞。这表明,通过模糊逻辑与超声传感器的结合,可以显著提升移动机器人的避障性能,使之在各种动态环境中更加可靠和自主。
总结来说,这篇论文的主要贡献在于提出了一种基于模糊逻辑的多超声传感器避障策略,它解决了单个超声传感器的幻影问题,为移动机器人提供了更准确和安全的环境感知能力,对于推动移动机器人技术的发展具有重要意义。未来的研究方向可能包括进一步优化模糊规则、提高算法鲁棒性,以及探索更多的传感器融合策略,以实现更高层次的智能避障。
移动机器人的超声模糊避障算法
Application of Fuzzy Algorith to a Sonar-Based Obstacle Avoidance Mobile Robot
刘喜昂 周志宇
Liu,Xi’ang Zhou,Zhiyu
摘要:超声传感器是移动机器人避障常用的传感器,但存在幻影的干扰。该文提出多个超声传感器的模糊
避障算法,该算法把多个超声传感器分为左右两组,如果障碍物在右侧,机器人就向左转,反之机器人向
右转。实验表明,该文提出的算法可以实现机器人的安全避障。
关键词:超声传感器;避障;模糊算法
中图分类号:TP24 文献标识码:B
Abstract: Obstacle avoidance by ultrasonic sensor is a normal instrument,but phantom target may influence
robot.The paper proposes a fuzzy algorith of obstacle avoidance with multi-ultrasonic sensor.It divides ultrasonic
sensors into left or right.If obstacle is in the right side,robot turns left,on the contrary,it turns right.Experiments
indicate that the algorith proposed in the paper can achieve safe obstacle avoidance of robot.
Key words: ultrasonic sensor; obstacle avoidance; fuzzy algorith
1 引言
移动机器人感知环境的手段是不完备的,传感器给出的数据是不完全的、不连续的,不
可靠的,因此移动机器人的安全避障成为当今机器人研究领域的一个焦点问题和难点问题。
安全避障具体的实现方法有很多种,主要有超声避障、视觉避障、红外传感器、激光避障、
接近觉传感器、微波雷达等避障方法。超声避障实现方便,技术成熟,成本低,成为移动机
器人常用的避障方法
[1][2]
,但超声避障存在一些缺点,如存在探测盲区等,特别是当超声传
感器和障碍形成一定角度时会产生幻影导致机器人得到错误的信息,从而发生碰撞。本文采
用多个传感器的模糊避障算法来克服超声传感器的幻影干扰,实现机器人的安全避障。
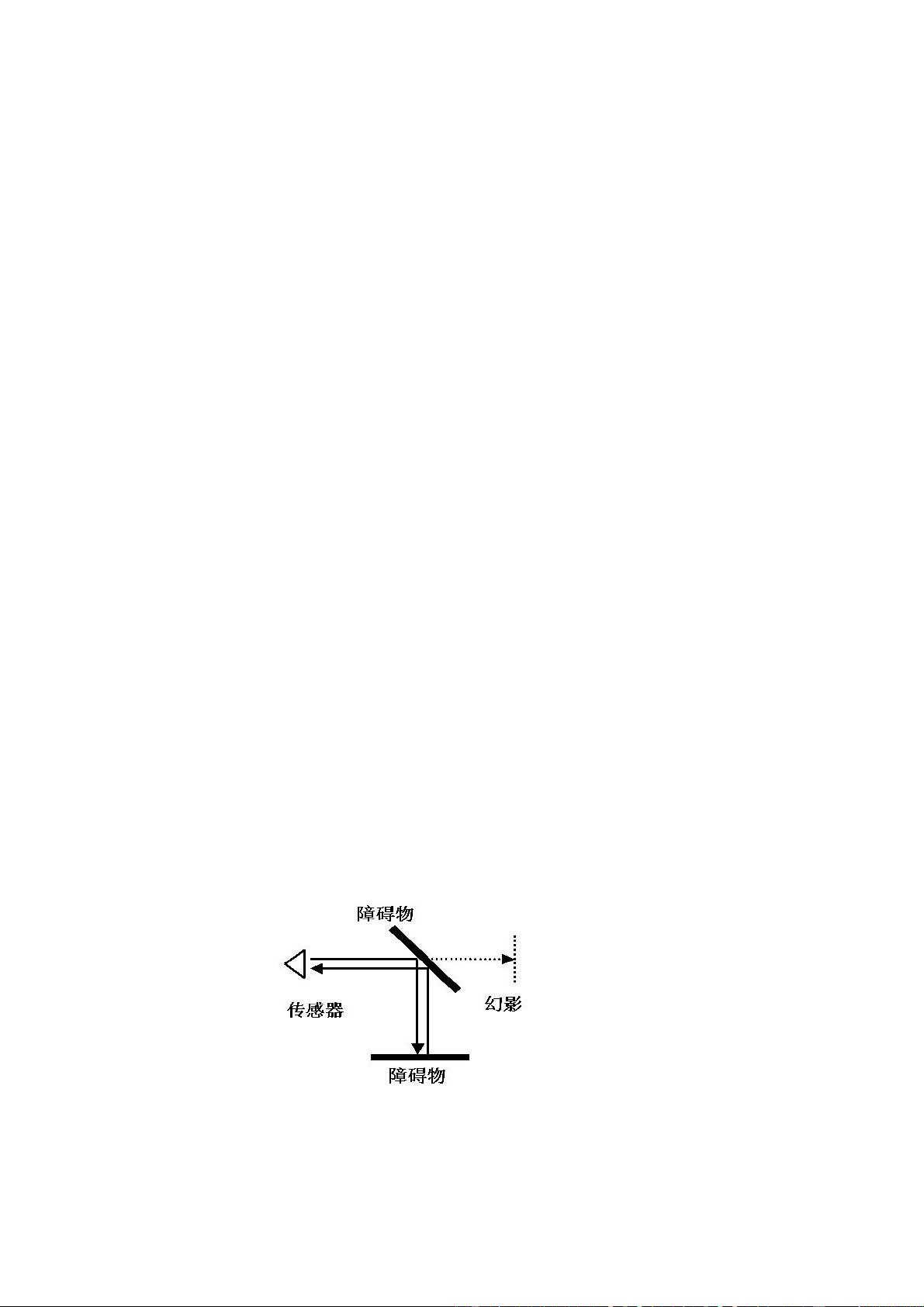
2 超声传感器的幻影现象
超声传感器是靠发射声波信号,利用物体界面上超声反射来检测障碍物。超声波在空气
中传播时如果遇到其它媒介,则因两种媒质的声阻抗不同而产生反射,因此可以根据分析检
测到的反射波来获取障碍物信息。超声传感器发出的超声波,是具有一定方向性的波束,当
超声传感器和障碍物形成一定角度时,会发生镜面反射,产生幻影。在图 1 中传感器发出的
超声波发生了镜面反射,虽然障碍物和机器人很近,但是由于幻影的产生,机器人误认为障
碍物很远,机器人就会和障碍物发生碰撞。
图 1 幻影产生示意图
3 传感器的位置排列
1
下载后可阅读完整内容,剩余4页未读,立即下载
2020-05-31 上传
2021-08-12 上传
2021-06-28 上传
2009-03-28 上传
2021-08-14 上传
2012-12-31 上传
2021-08-14 上传

chinayangzhenyu
- 粉丝: 1
- 资源: 14
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
