MATLAB实现的自动泊车模糊控制系统设计与仿真
版权申诉
55 浏览量
更新于2024-07-07
2
收藏 938KB DOC 举报
"基于MATLAB软件的自动泊车控制系统设计与仿真"
本文主要探讨了如何利用MATLAB软件设计和仿真一个自动泊车控制系统,该系统旨在解决驾驶员在泊车过程中遇到的速度与精度之间的矛盾,尤其是对新手司机的帮助。文中提到了模糊控制理论作为设计基础,因其不需要精确的数学模型,并能模拟人类的决策过程。
模糊控制理论的核心特点包括:
1. 不依赖被控对象的数学模型,而是基于人类对系统的控制经验设计控制器。
2. 采用模糊量(如“高”、“中”、“低”等)进行控制,模糊推理过程反映了人类的智慧。
3. 模糊规则用自然语言表达,易于理解和接受。
4. 模糊控制规则的构造相对简单,便于软件实现。
5. 具有良好的鲁棒性和适应性,能有效控制复杂对象。
自动泊车控制系统的设计中,MATLAB作为一个强大的软件工具,提供了实现模糊逻辑控制系统的平台。MATLAB的Simulink模块库包含了模糊逻辑工具箱,允许开发者构建、分析和优化模糊逻辑系统。通过这个工具,可以定义模糊集、模糊规则以及模糊推理过程,从而实现对汽车倒车过程的精确控制。
课题的背景与研究意义在于,随着汽车工业的智能化发展,自动泊车成为提升驾驶体验和安全性的关键技术。借助模糊控制,可以设计出一种智能控制系统,它能够根据车辆速度和位置自动调整,实现快速且精准的泊车。这一研究不仅有助于提升汽车的自动化水平,也有助于推动相关控制理论和技术的进步,为未来更复杂的自动驾驶功能提供参考。
此外,MATLAB的仿真功能使得在实际硬件实施前,可以通过虚拟环境对系统性能进行测试和优化,降低了开发成本,提高了系统的可靠性。通过这样的设计与仿真,可以不断迭代和完善控制策略,确保自动泊车系统在各种工况下的稳定性和准确性。
关键词:模糊控制,MATLAB仿真,智能控制,自动泊车
通过以上分析,我们可以看到,基于MATLAB的自动泊车控制系统设计利用了模糊控制的优势,有望为驾驶员提供更加便捷、安全的泊车体验,同时也展示了在现代汽车智能化领域中,软件工具和智能控制理论的广泛应用。

2.相关知识介绍
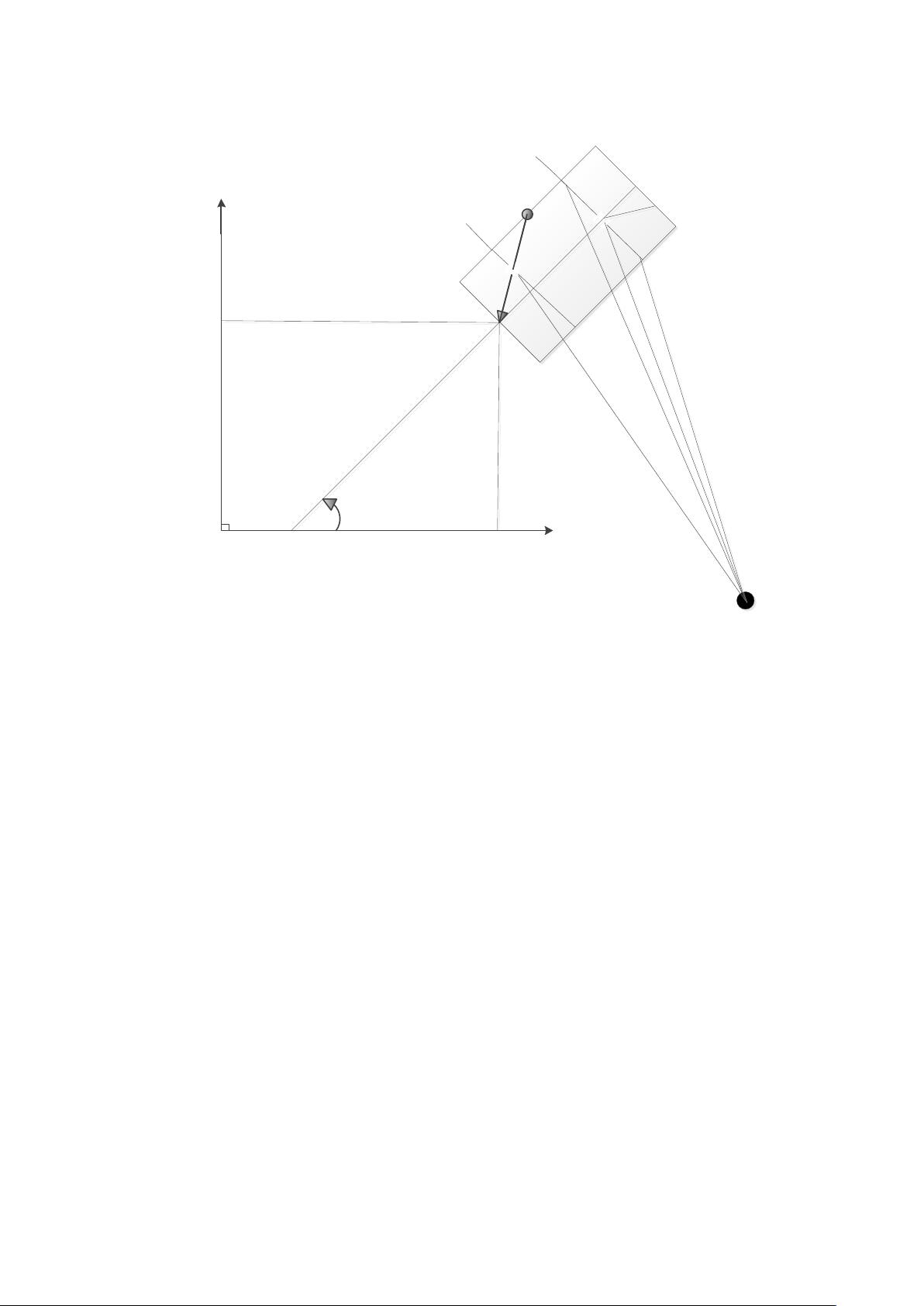
2.1车辆的数学模型
本文所研究的自动泊车系统,主要应用于前轮转向的四轮小车上。由于在
泊
车时,车辆行驶的速度一般不会很快,因此忽略离心力的作用,以及车轮与地面
打滑的情况。建模时,认为车轮是刚体圆盘。小车理想的动力学模型如图 2。1
所示:
剩余44页未读,继续阅读
247 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-10-31 上传
2024-10-31 上传
2024-10-30 上传









