深度学习入门:TensorFlow实战指南
需积分: 10 170 浏览量
更新于2024-07-18
收藏 5.82MB PDF 举报
"这本书是Manning出版社的《TensorFlow机器学习》早期访问版,旨在帮助读者从直觉上理解深度学习的基础,从而了解机器如何通过深度学习进行学习。"
在本书中,作者旨在教授深度学习的基本概念,让读者能够以直观的方式理解机器如何运用深度学习进行学习。"Machine Learning with TensorFlow"是针对那些对深度学习感兴趣,希望深入了解该领域的读者设计的。标签"Machine Learning"和"TensorFlow"明确了本书的核心内容,即机器学习技术,特别是使用TensorFlow这一强大的开源库进行实践。
书中提到的Manning Early Access Program (MEAP) 是Manning出版社的一种出版模式,允许读者在书完全完成之前就能获取并阅读最新版本的内容,以便及时跟进技术和理论的最新进展。在这个版本中,作者回应了读者的反馈,对每一章都进行了精心的修订和升级。文本得到了极大的改进,对于复杂问题的讲解更为详尽,特别是在读者需要更多解释的地方。所有的图表和数学公式都进行了更新,以更清晰、专业的形式呈现,提升了阅读体验。
代码部分已更新至TensorFlow v1.0版本,这是Google开发的一个用于构建和训练神经网络的强大工具,同时也可在GitHub(https://github.com/BinRoot/TensorFlow-Book/)上找到,方便读者下载和实践。章节的排列顺序也经过重新调整,以更好地按照学习曲线递进,确保读者在合适的时间掌握合适的技术。
作者对所有与他交流的读者表示感谢,无论是在官方书籍论坛、电子邮件、GitHub还是Reddit上的互动,他都认真倾听并考虑了读者的问题、建议和关切。尽管无法一一回复,但他对此表示歉意,并通过改进书中的内容来回应这些反馈。
《TensorFlow机器学习》这本书不仅提供了深度学习的基础知识,还强调了实践应用,通过TensorFlow这个强大的平台,使读者能够亲手实现各种深度学习模型。无论是初学者还是有一定经验的开发者,都能从中受益,深化对机器学习和深度学习的理解,并提升实际操作能力。
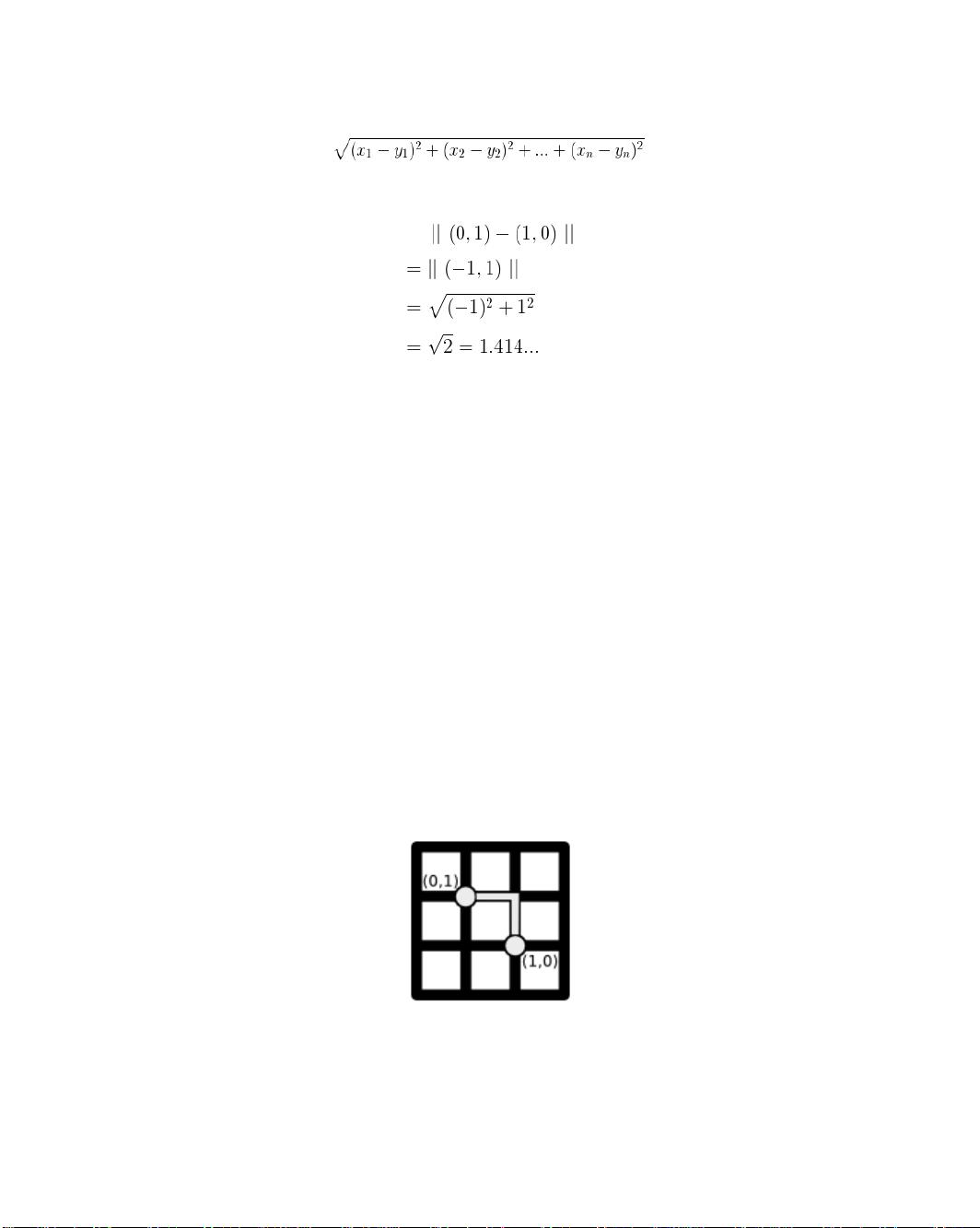
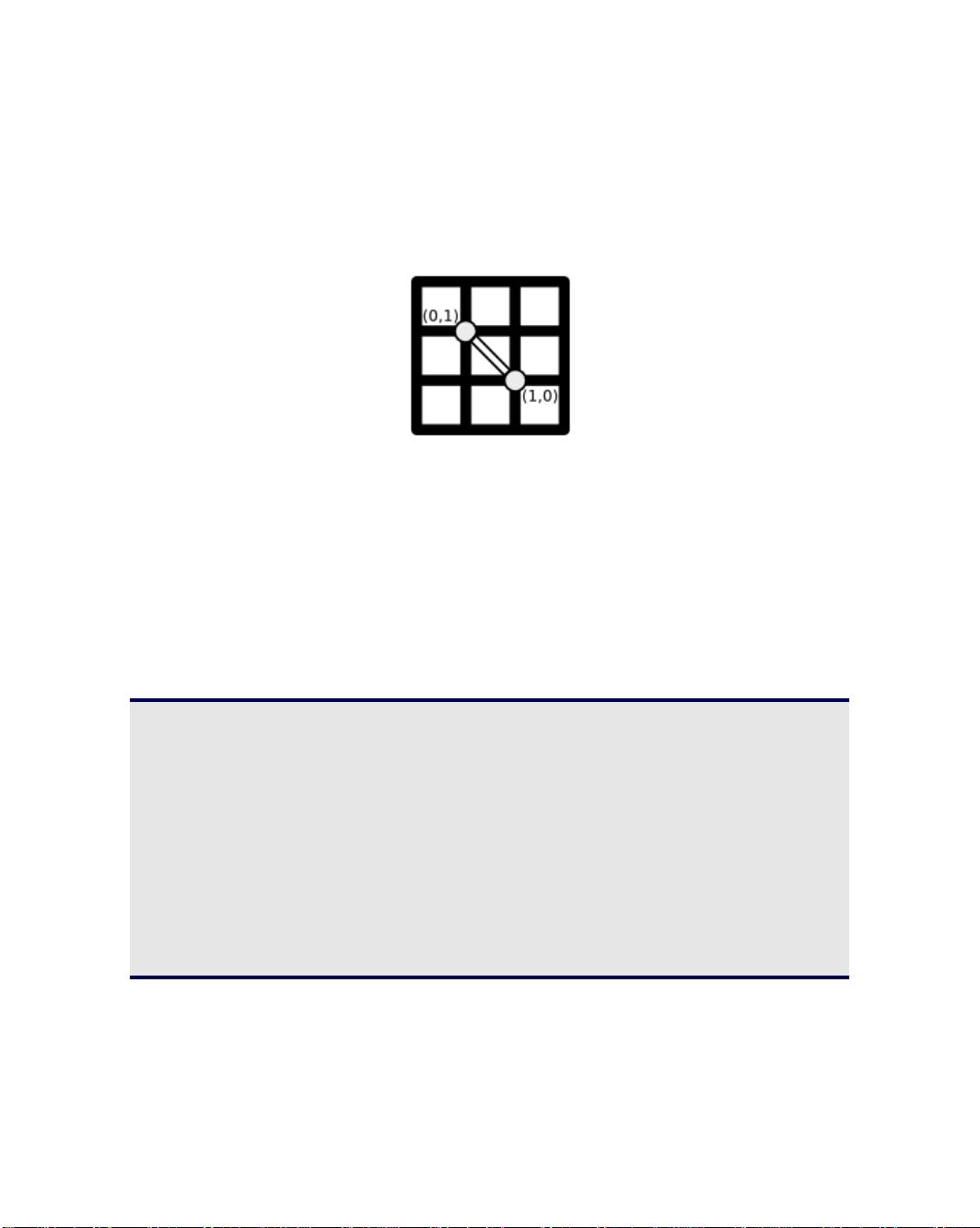
For example, the Euclidian distance between (0, 1) and (1, 0) is
Scholars call this the L2 norm. But that’s actually just one of many possible distance
functions. There also exists L0, L1, and L-infinity norms. All of these norms are a valid way to
measure distance. Here they are in more detail:
• The L0 norm counts the total number of non-zero elements of a vector. For example,
the distance between the origin (0, 0) and vector (0, 5) is 1, because there is only 1
non-zero element. The L0 distance between (1,1) and (2,2) is 2, because neither
dimension matches up. Imagine if the first and second dimensions represent username
and password, respectively. If the L0 distance between a login attempt and the true
credentials is 0, then the login is successful. If the distance is 1, then either the
username or password is incorrect, but not both. Lastly if the distance is 2, both
username and password are not found in the database.
• The L1 norm is defined as Σ|x
n
|. The distance between two vectors under the L1 norm is
also referred to as the Manhattan distance. Imagine living in a downtown area like
Manhattan, New York, where the streets form a grid. The shortest distance from one
intersection to another is along the blocks. Similarity, the L1 distance between two
vectors is along the orthogonal directions. So the distance between (0, 1) and (1, 0)
under the L1 norm is 2. Computing the L1 distance between two vectors is essentially
the sum of absolute differences at each dimension, which is a useful measure of
similarity.
Figure 1.10 The L1 distance is also called the taxi-cab distance because it resembles the route of a car in a grid-
like neighborhood such as Manhattan. If a car is travelling from point (0,1) to point (1,0), the shortest route
requires a length of 2 units.
12


剩余243页未读,继续阅读
269 浏览量
553 浏览量
131 浏览量
169 浏览量
121 浏览量
138 浏览量
262 浏览量
142 浏览量
110 浏览量

u010616159
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 应用简单线性回归于员工薪酬数据分析
- Qt仿Android Toast控件:跨平台编译教程
- 易语言实现QQ功能:网络数据交互及数据库模块设计
- rails-mister-鸡尾酒:topShelf应用的便捷饮料收藏
- HCPopupViewController使用教程与示例
- MFC实现推箱子小游戏教程及资源下载
- C++内嵌汇编实现π与e高精度计算程序
- Discordia bot部署于Heroku的Lua模板使用指南
- 网页文字抓取器:屏蔽右键功能下文字抓取技巧
- 一键快捷截图,简化你的工作流程
- Spring框架入门教程,小白一看就懂
- 基于CNN的面部美容预测器实现研究
- 美颜瘦身DEMO:深度学习助力瘦腿瘦腰效果揭秘
- C#开发的MemCache监控管理工具介绍
- Moodle公告系统:定制化交流与管理工具
- CodeSandbox实现无限滚动的中介器模式平台演示
