摄像机标定与张正友方法解析
需积分: 0 143 浏览量
更新于2024-08-04
收藏 2.96MB DOCX 举报
"摄像机模型与标定方法"
在计算机视觉领域,摄像机模型和标定是至关重要的基础知识。本文将详细解析摄像机模型中的参数及其含义,摄像机标定的作用,以及张正友标定方法的主要思想和实现过程。
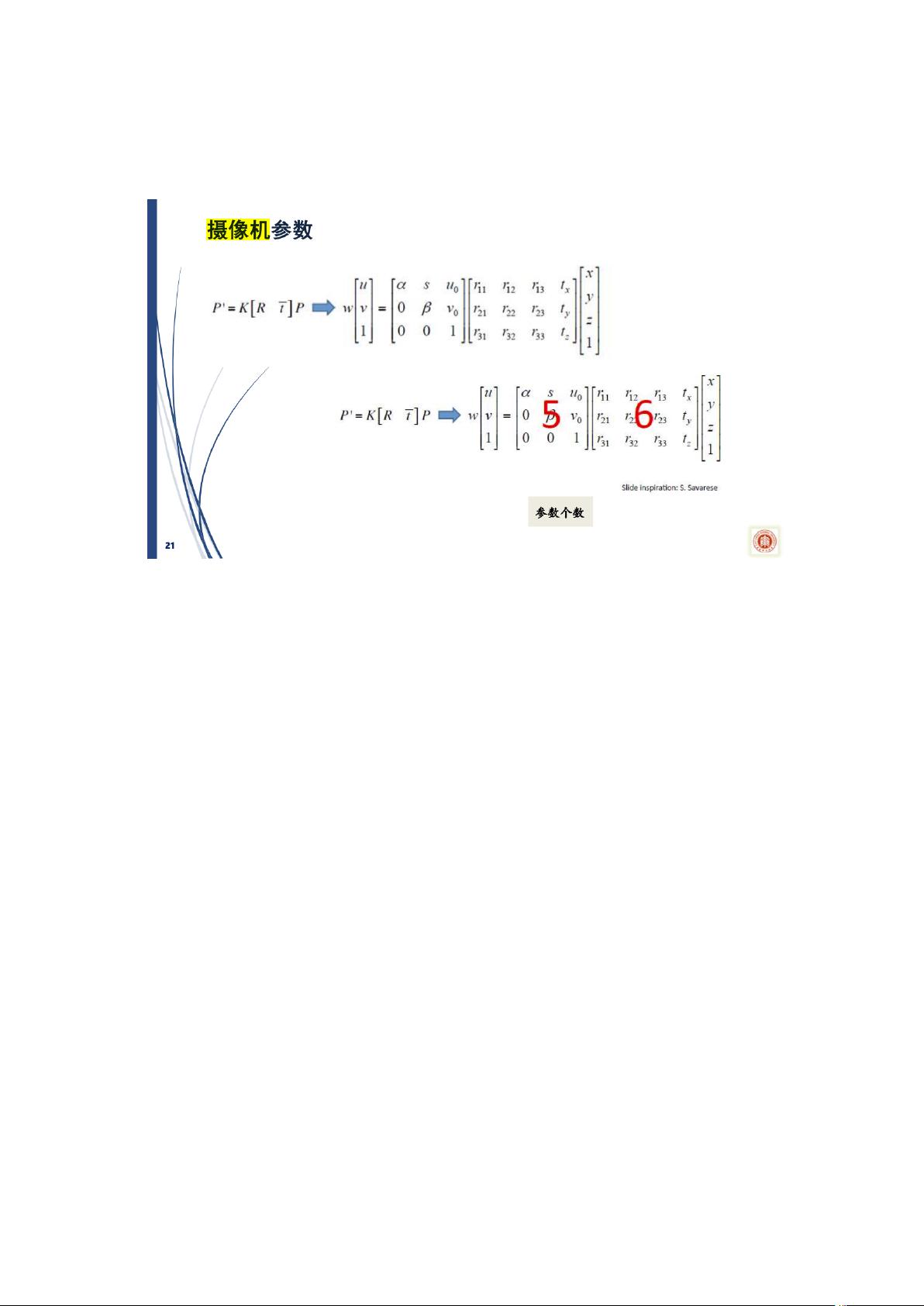
一、摄像机模型参数
摄像机模型通常基于小孔成像原理,其中包括内参数和外参数。内参数主要描述摄像机自身的特性,包括:
1. 焦距f:图像传感器上的焦距,决定了图像的缩放比例。
2. 像素尺寸:每个像素在实际物理空间中的大小。
3. 主点c(x_c, y_c):图像中心的像素坐标,即光轴与图像平面的交点。
4. 畸变系数:包括径向畸变和切向畸变,用来校正由于镜头不完美导致的图像扭曲。
外参数则涉及到摄像机相对于被摄物体的位置和姿态,包括:
1. 旋转矩阵R:表示摄像机坐标系与世界坐标系之间的相对旋转。
2. 平移向量T:表示摄像机中心在世界坐标系中的位置。
通过标定,可以获取这些参数,从而进行图像矫正、三维重建等任务。
二、摄像机标定
摄像机标定是为了求得摄像机的内参数、外参数和畸变系数。它通常需要使用已知几何形状的物体(如棋盘格)作为标定对象,在不同角度下拍摄多张图像。标定过程可以分为两步:
1. 特征检测与匹配:在图像中找到棋盘格角点,建立图像坐标与世界坐标之间的对应关系。
2. 参数估计:利用这些对应关系,通过优化算法(如最小二乘法)求解摄像机参数。
三、张正友标定方法
张正友标定法是一种广泛应用的摄像机标定技术,其核心思想是通过拍摄多张棋盘格图像,计算每张图像中棋盘格角点的世界坐标和图像坐标,然后利用非线性优化算法(例如Levenberg-Marquardt算法,简称L-M算法)求解内参数、外参数及畸变系数。
在提供的代码中,可以看到使用OpenCV库实现了张正友标定方法。代码执行后,返回了以下结果:
1. 内参数矩阵(internalmatrix):包括焦距、主点坐标和像素尺度。
2. 畸变系数(distortioncoefficients):径向畸变和切向畸变的系数。
3. 旋转向量(rotationvectors):每张图像对应的摄像机旋转矩阵的旋转向量表示。
这些参数可用于后续的图像处理和计算机视觉应用,例如消除图像畸变、进行立体视觉匹配、三维重建等。
总结,摄像机模型和标定是计算机视觉领域的基础,张正友标定法提供了有效的参数估计手段。理解并掌握这些知识,对于开发和应用相关技术,如自动驾驶、无人机导航、增强现实等,至关重要。
一、基础作业内容
1. 摄像机模型(小孔成像模型)中有几个参数?它们的含义是什么?
有 5 个内参,6 个外参,内参是至于相机有关,外参取决于相机在世界中的
位置。内参是为了矫正畸变,而外参是为了坐标系之间转换。
2. 摄像机标定有什么用途?
可以得到求出相机的内、外参数,以及畸变参数。
得到这些参数后就可以修复畸变,进行三维重建、测距等工作
3. 自标定方法有什么优点?
自标定方法仅依靠多幅图像之间的对应关系进行标定,使用方便,灵活性强,
潜在应用范围广。
二、选做内容
1. 查阅文献及资料,阐述张正友标定方法的主要思想,查找代码(可以是 OpenCV
的)实现标定功能,给出代码和结果。
主要思想是从不同角度拍摄若干张模板图象,从而求出摄像机的内参数和外
参数,并利用 L-M 算法对参数进行优化。
代码:https://paste.ubuntu.com/p/gmqFTCtVS6/
下载后可阅读完整内容,剩余3页未读,立即下载
2022-08-08 上传
2022-08-08 上传
2022-08-08 上传
2022-08-08 上传
2022-08-08 上传
2022-08-08 上传
2021-05-01 上传
2021-07-11 上传
2021-03-27 上传

艾苛尔
- 粉丝: 34
- 资源: 307
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
