机器人视觉标定与工件坐标系设定指南
需积分: 12 94 浏览量
更新于2024-07-15
1
收藏 2.88MB PPTX 举报
"该资源是关于机械手标定的PPT,主要讲解了如何在自动化行业中使用机器手进行引导定位,特别关注了机器手的标定过程,包括工件坐标系和相机的非线性校正等关键步骤。"
在自动化行业中,机器手的标定是确保其精确抓取和移动工件的关键。这个过程通常涉及到多个阶段,首先从工件坐标系的方法标定开始。工件坐标系是定义机器人操作中工件位置的基础,它的标定涉及确定相机与工件之间的相对位置。在实际操作中,相机先捕捉图像,然后机器人根据相机提供的坐标来执行抓取任务。
标定过程的第一步是通过4点法建立工具坐标系,将坐标原点设定在夹具的尖端。接着,机器人和相机在已建立的工具坐标系下执行9点标定,这有助于更精确地识别工件位置。在这一阶段,还需要建立机器人的工件坐标系,通常选择工件上的某个点作为原点。对于处理多种零件的项目,建议选择相机视野的中心作为原点。
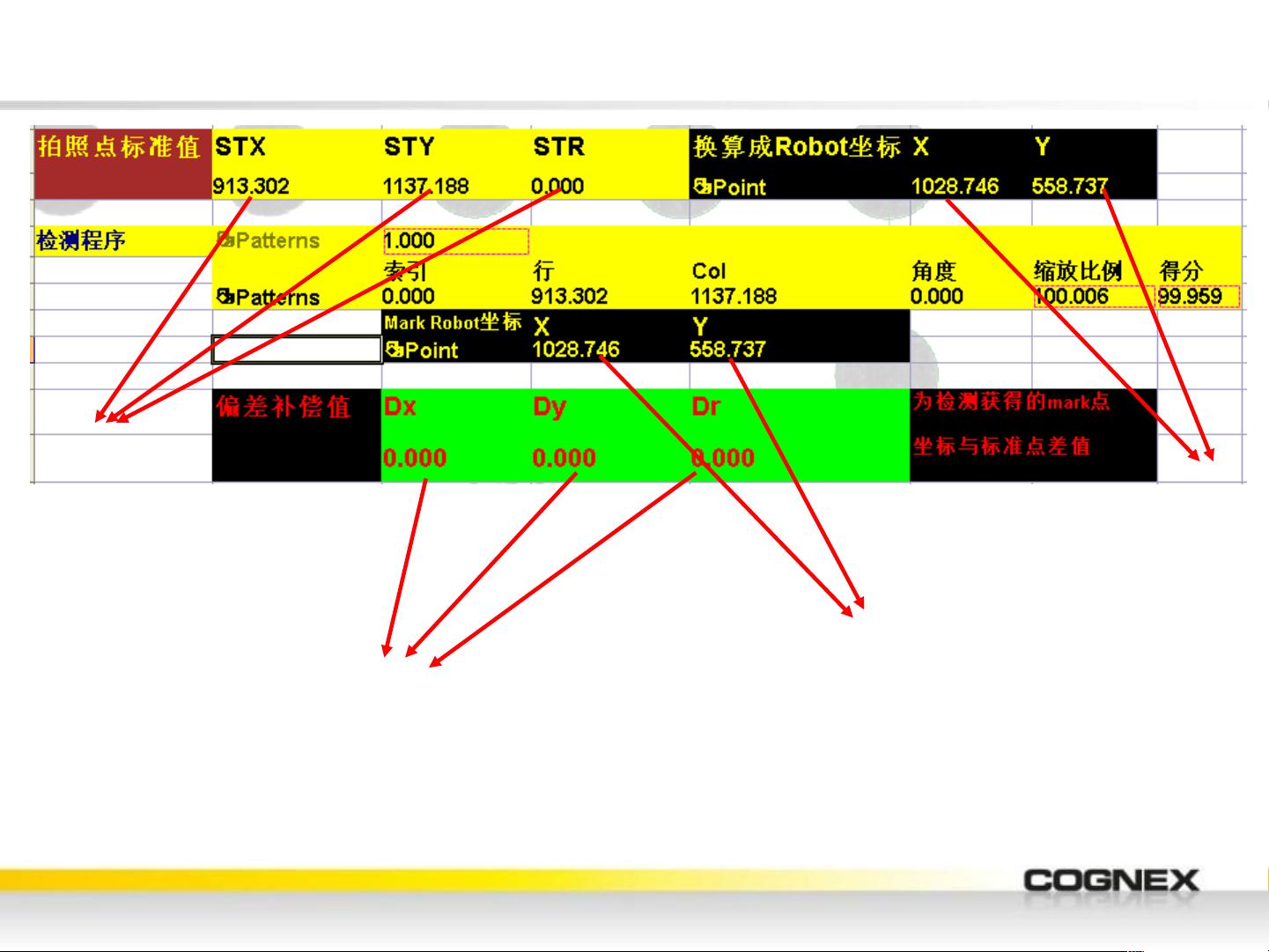
接下来,对相机进行非线性校正,特别是通过九点标定来校正相机的透视失真。在这个步骤中,机器人返回拍照位置拍照标准工件,并利用Patmax或其他定位工具对工件进行定位,确保Patmax原点与工件坐标系的原点重合。这一步记录了Mark点(Patmax坐标)的像素值和转换后的RobotXY值,作为标准位置。
在计算过程中,会求得每次工作时Mark点相对于标准位置的偏差量Dx、Dy和Dr。这些偏差值被加到机器人提供的工件坐标系原点的全局坐标上,形成新的工件坐标系原点进行补偿。这样,机器人就能基于修正后的坐标和已知的抓取姿态准确地执行抓取任务。
整个标定和计算流程结束后,会得到一个经过视觉补偿的新工件坐标系,其原点的全局坐标是机器人创建工件坐标系时的初始坐标加上补偿量。通过这种方式,即便相机或环境有微小变化,也能保证机器人能准确无误地定位和抓取工件。
总结来说,机器手标定是一个涉及相机校正、坐标系建立和补偿计算的复杂过程,目的是确保机器人在自动化作业中具备高精度的定位能力。这个PPT详细介绍了每个步骤,对理解和实施机械手标定非常有帮助。
7 | Confidential © 2012 Cognex Corporation
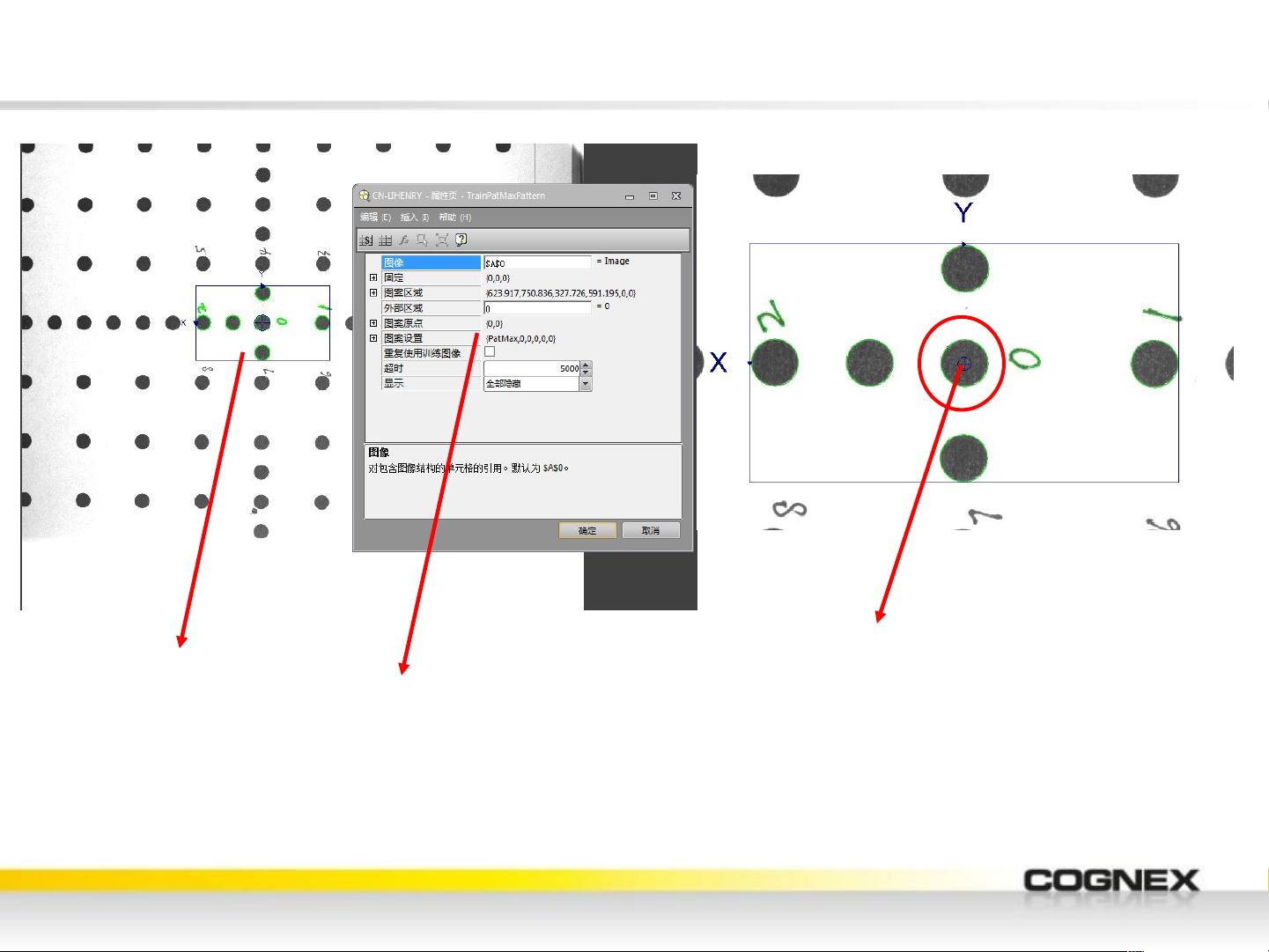
相机部分 - 训练 PatMax
图案原点,必要
时可以调节位置
PatMax 模型
使图案原点与工件坐标系的原点
重合,如果选取的区域的中心和
工件坐标系原来不一致,可以通
过调节图案原点,使两者重合
剩余39页未读,继续阅读
2021-10-06 上传
2022-03-11 上传
2021-10-04 上传
2021-10-11 上传
2021-09-23 上传
2021-10-20 上传
2021-10-22 上传
2021-10-04 上传
2021-10-02 上传

FW688886
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Credits-App:积分叠加
- meetup_map_oauth2:使用 OAuth2 通过 Meetup API 获取事件
- 行业分类-设备装置-同时向主叫用户和被叫用户播放多媒体信息的方法.zip
- react todo list and counter:精益应对构建Webapp待办事项列表和计数器应用程序-开源
- 数据库管理
- Manual-Gating
- 行业分类-设备装置-可翻转式台板和用于PCBA测试的机器人上下料系统.zip
- BeatDetectorForGames:用于视频游戏的 C++ 和 C# 节拍检测器。 可以接收歌曲并检测节拍发生的位置,例如在 Vib-Ribbon 等游戏中
- 医学图像分割经典深度学习网络Python代码实现.zip
- MLEM:MLEM库,用于扩展MonoGame
- terraform-aks-devops:使用AzureDevOps设置AKS群集的示例存储库
- 行业分类-设备装置-台式陶瓷三维喷印成形机.zip
- Catwalk:一种使客户能够搜索,浏览,添加到购物车和结帐项目的产品
- FastFileTransfer
- gulp-setup:gulp 的入门项目
- 行业分类-设备装置-可见光无源光充电标签与读写器装置.zip
