实时LOAM方法:激光雷达建图与定位
需积分: 33 144 浏览量
更新于2024-07-09
1
收藏 2.06MB DOCX 举报
"这篇文档是关于LOAM(激光雷达里程计和映射)技术的中文翻译,适合初学者了解和研究。作者花费一个月时间完成翻译,可能存在专业术语翻译不准确的地方,欢迎指正。该文档详细阐述了LOAM在实时建图中的应用,通过两种算法的组合实现低漂移和高效计算,适用于6自由度移动的2轴激光雷达系统。文档还提到了LOAM与离线批处理方法的比较,以及在实际应用和实验中的表现。"
在SLAM(Simultaneous Localization and Mapping,同时定位与建图)领域,LOAM是一种基于激光雷达的实时解决方案,特别适合于移动平台,如无人机和自动驾驶车辆。LOAM的关键在于它能够有效地处理激光雷达数据,减少由运动引起的测量误差,从而构建出高精度的3D地图。
1、技术概述
LOAM解决了移动激光雷达系统中的一大挑战,即如何在不同时间接收的不连续距离测量中进行精确配准。传统方法依赖于GPS/INS或其他传感器,但这些方法易受漂移影响。相反,LOAM通过分离定位和建图任务,实现了低漂移和低计算复杂度。它包含两部分算法:高频里程计算法用于快速估算激光雷达的速度,降低实时运动估计的误差;低频建图算法则负责精细匹配和点云配准,确保长期一致性。
2、里程计算法
里程计算法利用激光雷达的高频测量,连续跟踪环境特征,估计设备的运动速度。这种方法可以快速响应瞬时运动变化,但因为仅关注局部信息,所以精度有限。
3、建图算法
建图算法则在较低的频率下运行,通过匹配不同时间的激光点,进行全局优化,以减少累积误差。它考虑了点云间的对应关系,使得随着时间的推移,地图保持连贯性。
4、优势与应用
LOAM的优势在于其对光照和纹理不敏感的特性,这使得它在各种环境条件下都能稳定工作。随着激光雷达技术的发展,更小、更轻的设备使得LOAM在手持设备和微型飞行器上有了广泛的应用前景。
5、评估与比较
通过大量的实验和KITTI里程计基准测试,LOAM证明了其在实时性和精度上可与离线批处理方法相媲美。尽管如此,LOAM目前尚未涉及回环检测,这是一个重要的SLAM策略,用于检测并修正长时间的漂移。
总结来说,这篇文档详细介绍了LOAM的工作原理和技术细节,对于理解和实践激光雷达驱动的SLAM系统有着重要的参考价值。
我们假设激光雷达是预先校准的,同时激光雷达的角速度和线速度随时间平滑连续,没有
突变。第二个假设将通过使用第 VII-B 节中的 IMU 发布。
依照惯例在本文中,我们使用右手坐标系。我们将扫描定义为激光雷达完成一次扫描
覆盖。我们使用正确的订阅 表示扫描, 表示扫描 期间获得的点云。让我们
定义两个坐标系,如下所示:
① 激光雷达坐标系 是一个三维坐标系,其原点位于激光雷达的几何中心。 轴指
向左侧, 轴指向上方, 轴指向前方。 表示激光雷达坐标系 下一个点 的坐标,
其中 。
② 世界坐标系 是一个三维坐标系,在初始位置与 重合。 表示世界坐标
系下的一个点 的坐标,其中 。
做出假设和标记后,我们的激光雷达里程计和建图问题可以被定义为:
问题:已知一系列激光雷达点云 , ,计算激光雷达点云在每次扫描 期间
的自身运动状态,并使用点云 构建环境地图。
4、系统概述
A、雷达硬件
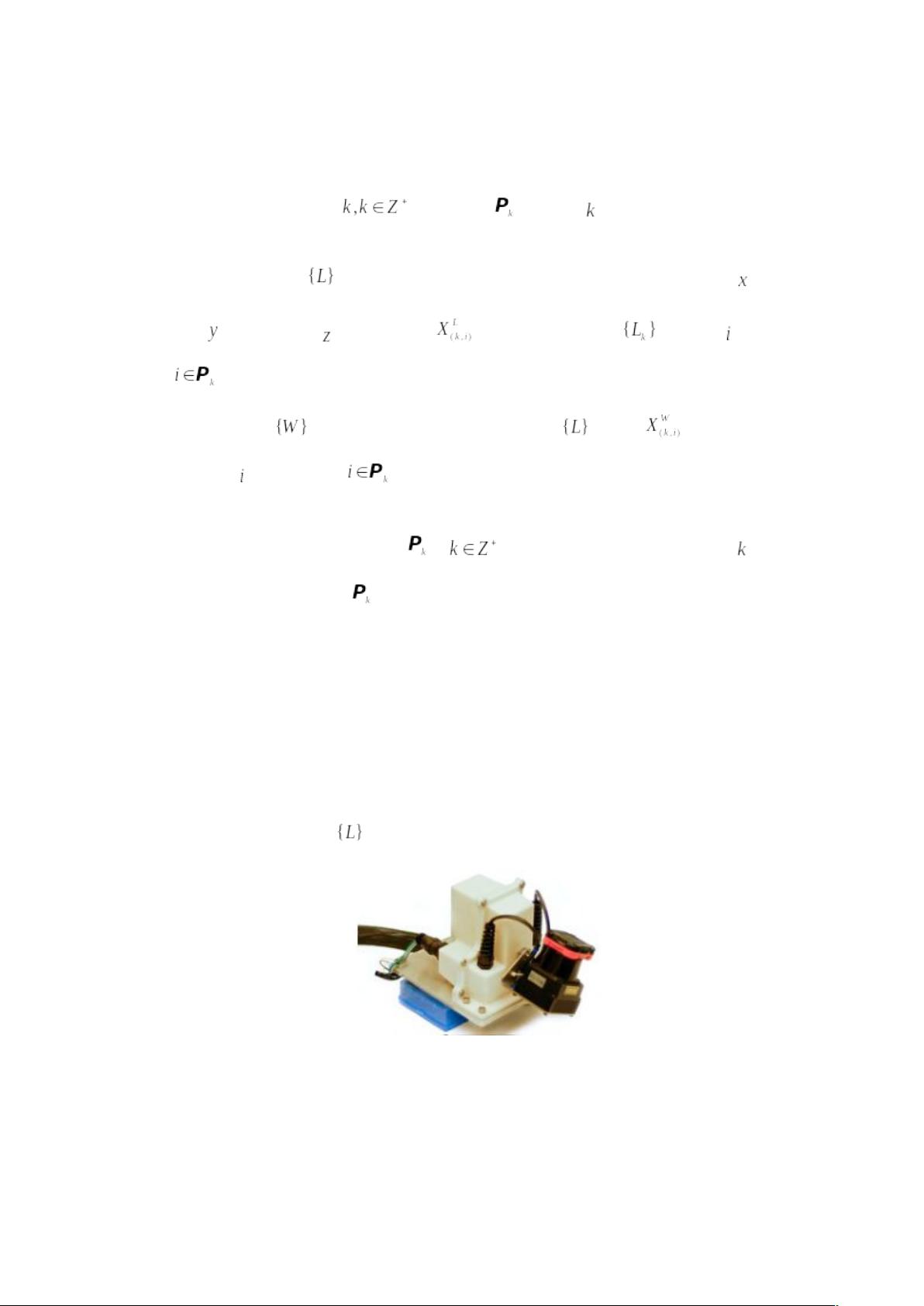
本文的研究在基于 Hokuyo UTM-30LX 激光扫描仪的定制 3D 激光雷达上得到验证,
但不限于此。本文中,我们将使用从激光雷达收集的数据来说明该方法。激光扫描仪的视
场为 180°以 0.25°分辨率和 40 行/秒扫描速率。激光扫描仪连接到一个电机,该电机被控
制以 180 的角速度旋转介于−90°和 90°激光扫描仪的水平方向为零。对于此特定单元,
扫描是从−90°到 90°或相反方向(持续 1s)。这里,请注意,对于连续旋转的激光雷达,
扫描只是一个半球形旋转。车载编码器以 0.25°的分辨率测量电机旋转角度◦, 利用它将激
光点云投影到激光雷达坐标 。
图 2(本研究中使用的 3D 激光雷达包括一个由旋转电机驱动的 Hokuyo 激光扫描仪
和一个测量旋转角度的编码器。激光扫描仪的视场为 180°分辨率为 0.25°. 扫描速率为
40 行/秒。电机被控制为从轴旋转−90°到 90°激光扫描仪的水平方向为零。)
剩余14页未读,继续阅读
2022-09-23 上传
2020-02-08 上传
2019-09-30 上传
2023-02-23 上传
2023-02-23 上传
2021-06-09 上传
2020-10-17 上传
2022-03-16 上传
2020-11-15 上传


向上的Stone
- 粉丝: 90
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索AVL树算法:以Faculdade Senac Porto Alegre实践为例
- 小学语文教学新工具:创新黑板设计解析
- Minecraft服务器管理新插件ServerForms发布
- MATLAB基因网络模型代码实现及开源分享
- 全方位技术项目源码合集:***报名系统
- Phalcon框架实战案例分析
- MATLAB与Python结合实现短期电力负荷预测的DAT300项目解析
- 市场营销教学专用查询装置设计方案
- 随身WiFi高通210 MS8909设备的Root引导文件破解攻略
- 实现服务器端级联:modella与leveldb适配器的应用
- Oracle Linux安装必备依赖包清单与步骤
- Shyer项目:寻找喜欢的聊天伙伴
- MEAN堆栈入门项目: postings-app
- 在线WPS办公功能全接触及应用示例
- 新型带储订盒订书机设计文档
- VB多媒体教学演示系统源代码及技术项目资源大全
