ROS2安装指南与基础介绍
需积分: 10 42 浏览量
更新于2024-07-14
收藏 1016KB PDF 举报
本文档详细介绍了ROS2的安装步骤、基本概念以及关键特性,旨在帮助读者理解和上手这个新一代的机器人操作系统。ROS2相较于其前代版本,具有更高的工业级稳定性、更丰富的功能,并支持DDS(Data Distribution Service)作为中间件实现。
**1. ROS2简介**
ROS2(Robot Operating System version 2)是一个面向实时系统的开源操作系统,专为机器人开发设计,强调可靠性、高效性和安全性。新版本的目标是简化部署流程,提供更好的性能,并且支持多种编程语言和消息传递机制(RMWs,如RMW Fast-RTPS, RMW C++等)。
**2. 安装指南**
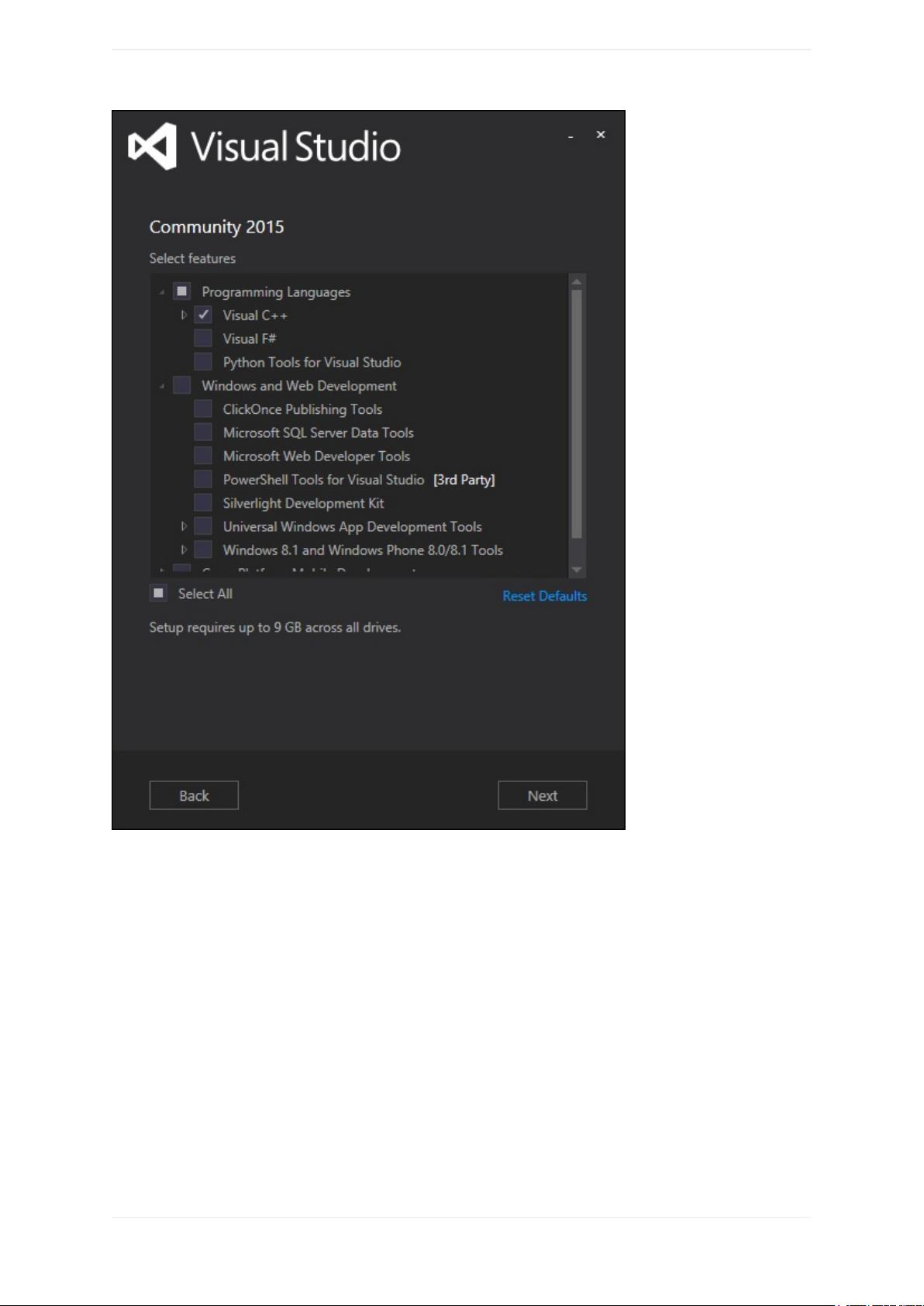
文档首先讲述了在Linux环境下通过Debian包安装的过程。用户需要设置软件源并添加官方的gpg密钥,确保软件来源的可信。对于Windows用户,需满足特定的硬件要求,包括安装Chocolatey、Python、Visual Studio Community 2015等,并安装必要的依赖如DDS程序和OpenCV。
**3. 客户端程序库与接口**
ROS2提供了客户端程序库,方便开发者创建节点(nodes),并通过接口(如话题和服务)进行通信。服务质量设置允许用户根据应用场景调整数据传输的可靠性和延迟。
**4. 学习路径**
教程部分指导读者从源码安装ROS2,强调了使用ament工具构建自定义软件包的重要性,以及如何通过命令行工具进行调试。此外,还介绍了如何在单个进程中运行多个节点,定义自定义的消息和服务接口,并了解ROS2在接口方面的新增特性。
**5. 高级主题**
文档深入探讨了高级概念,例如自定义内存分配器的选择,这可以帮助开发者优化性能。此外,对于遇到的问题,文档还提供了常见问题解答,覆盖了Linux环境下安装过程中可能出现的常见问题。
这篇文档是一份全面的ROS2安装和入门指南,适合对机器人操作系统感兴趣的开发者、研究人员或工程师参考,帮助他们快速掌握ROS2的安装配置和核心概念。
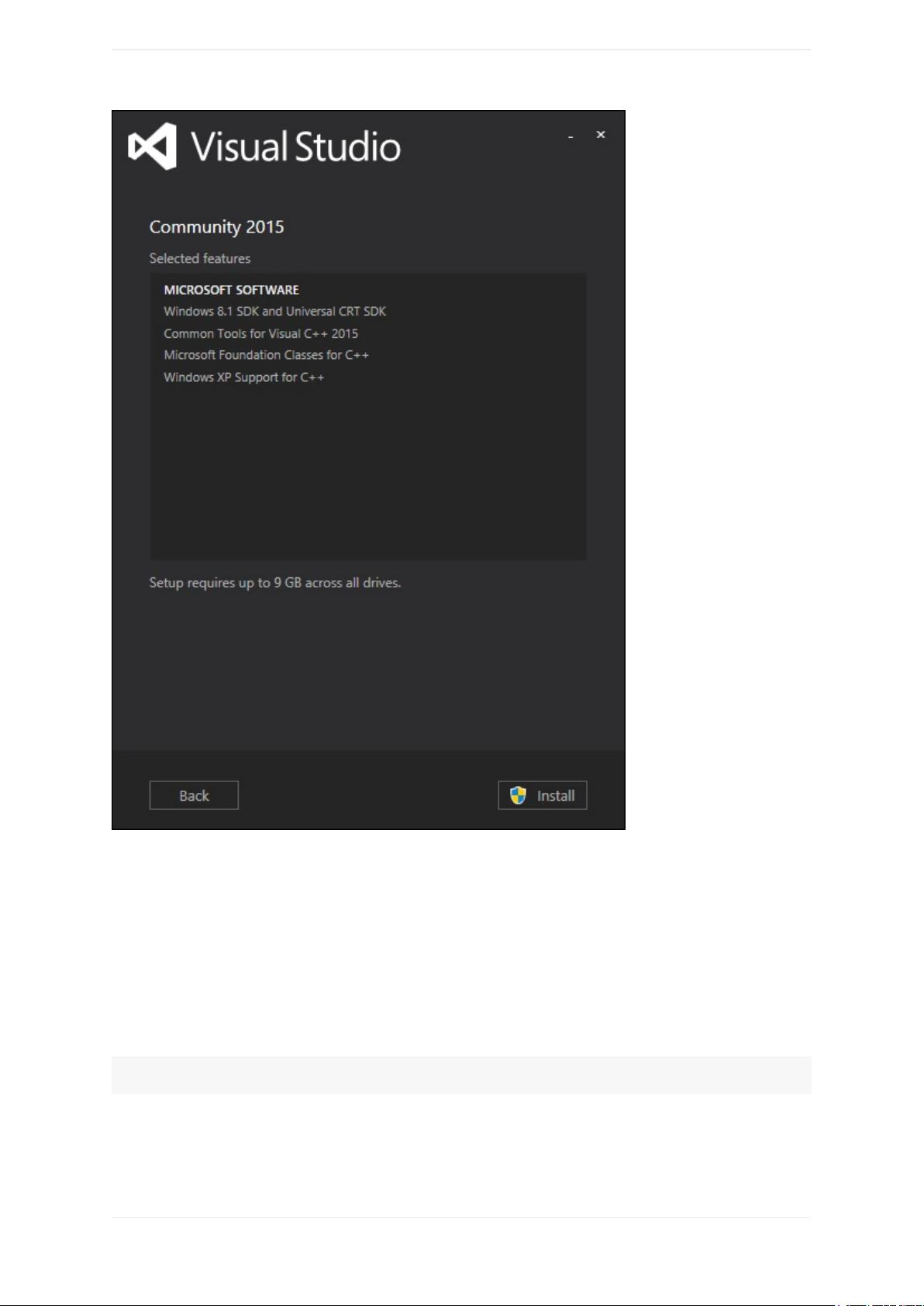
再次确认已经选择上了对应的功能
安装
7
剩余39页未读,继续阅读
2024-07-04 上传
2021-02-01 上传
2021-08-23 上传
2024-07-23 上传
2021-08-31 上传
176 浏览量
2023-02-27 上传
2021-08-14 上传
2022-11-03 上传

程序猿小怪兽
- 粉丝: 1w+
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
