高精度单像鱼眼相机标定:多几何约束方法
124 浏览量
更新于2024-08-27
收藏 12.87MB PDF 举报
“多几何约束下的鱼眼相机单像高精度标定”是一种针对鱼眼相机进行高精度校准的技术,它利用单张近似垂直棋盘格的图像,结合多种几何约束逐步求解相机参数,并进行全局优化。该方法首先通过鱼眼图像的轮廓对称性确定相机主点位置,然后通过椭圆拟合和灭点计算得到相机的等效焦距和旋转矩阵角度。接着,利用径向对准约束和平移矢量的线性求解,进一步优化参数。最终,通过最小化重投影误差全局优化所有相机参数,并对鱼眼图像进行立方盒展开纠正。实验表明,这种方法在海康威视的不同视野范围的鱼眼相机上实现了小于1/3像素的重投影均方根误差,矫正效果优于常见的在线标定工具箱。
鱼眼相机由于其大视角和独特的成像特性,广泛应用于机器视觉领域。然而,鱼眼镜头产生的图像畸变严重,因此需要进行精确的标定来校正这种畸变。本研究提出的多几何约束标定方法首先利用鱼眼图像的轮廓特征,通过轮廓对称性计算主点位置(u0, v0),解决了黑色背景下的轮廓点检测难题。接下来,通过对棋盘格中两组垂直平行线的椭圆拟合,找出灭点,从而推断出相机的等效焦距(fx, fy)和旋转矩阵的角度初始值。
灭点是透视几何中的关键概念,当两条平行线在远距离交汇时,它们在图像上的投影会聚于一点,即灭点。在鱼眼图像上,平行线的投影会形成椭圆,椭圆的交点对应于灭点。通过计算这些灭点并反投影到单位球面上,可以得到相机的几何特性。
径向对准约束是另一个用于优化相机参数的关键步骤。结合棋盘格的角点信息,可以先线性求解平移矢量(tx, ty)的初值,然后通过一元二次方程确定tz的初值。这一过程有助于更准确地定位相机在空间中的位置。
全局优化阶段,通过最小化棋盘格角点的重投影误差,对除主点外的所有相机参数进行优化。这一步骤确保了标定结果的准确性,减少了重投影误差,提高了图像矫正的效果。
实验结果证明,该方法在海康威视的两种不同视野范围的鱼眼相机上,重投影均方根误差低于1/3像素,且对鱼眼图像的平面透视纠正效果稳定,中心区域的纠正优于边缘。棋盘格角点的直线拟合RMSE小于0.7像素,显著优于常见的在线标定工具箱。这种方法对于需要高精度鱼眼图像矫正的应用具有较高的实用价值。
关键词涉及的领域包括机器视觉、鱼眼相机标定、鱼眼图像矫正、灭点以及径向对准约束。该研究为鱼眼相机在机器人导航、自动驾驶、全景摄影等领域的应用提供了更可靠的图像处理基础。
光
学
学
报
模型基础上引入鱼眼镜头径向
偏心
以及薄棱镜光
学畸变
建立一种精确标定鱼眼镜 头成像立体 视
觉系统的方法
但其参数 多 达
个
存在过参 数 化
问题
且需通过特定 设 备先对鱼 眼 镜头光学 中 心进
行标定
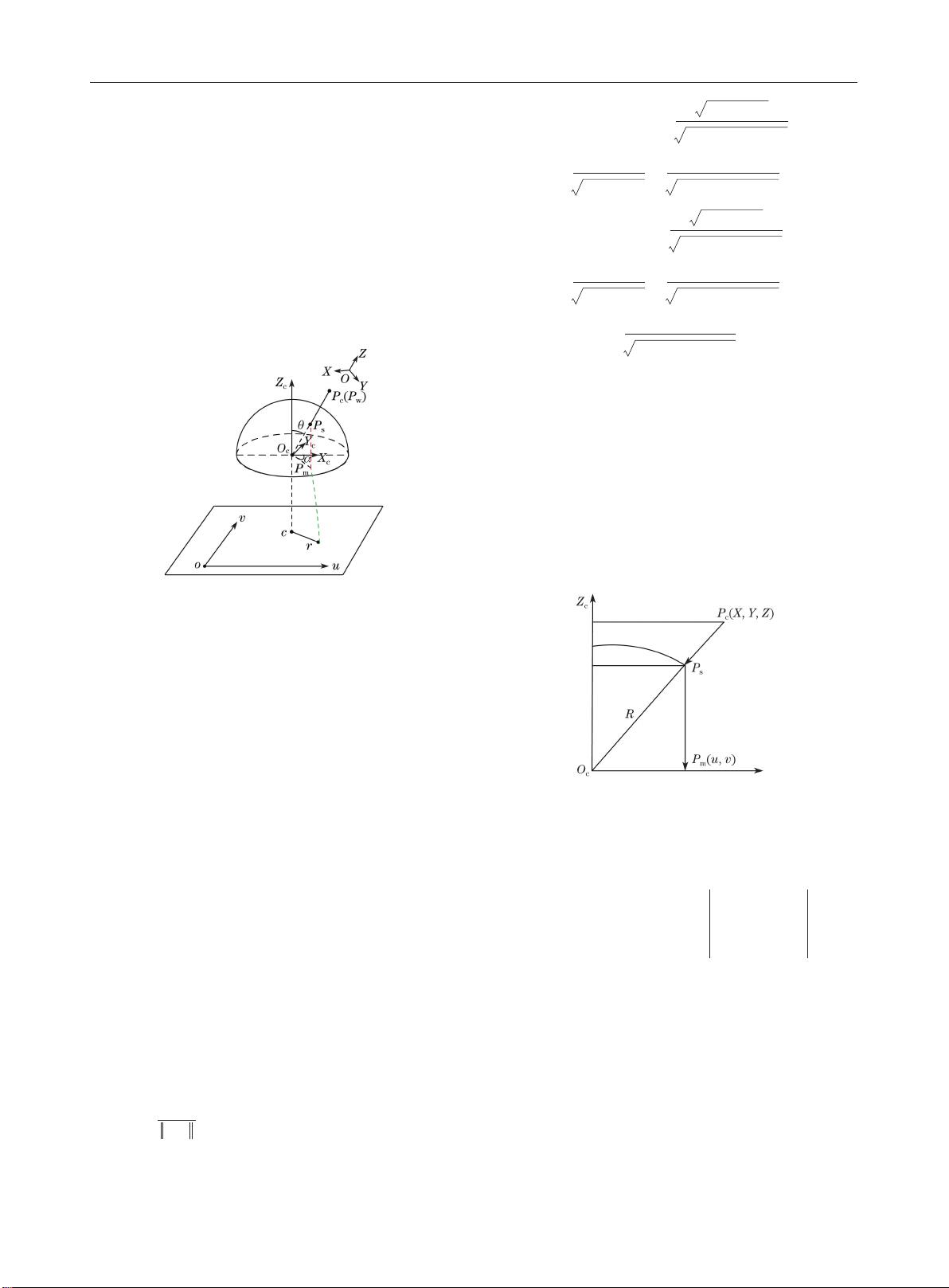
鱼眼成像模型
本文 鱼眼成像采 用球面透视 投影模型
整个成
像过程如图
所示
经
个阶段从 空 间点变换 到 鱼
眼图像像素坐标
图
鱼眼相机成像过程
空间坐标变换
即将世界坐标系下任一空间
点
P
X
Y
Z
经 旋 转 和 平 移 空 间 坐 标 变
换
转换为相机坐标系下的点
P
X
Y
Z
两
者满足以下关系
X
Y
Z
é
ë
ê
ê
ê
ê
ù
û
ú
ú
ú
ú
=
R
×
X
Y
Z
é
ë
ê
ê
ê
ê
ù
û
ú
ú
ú
ú
+
T
=
r
r
r
r
r
r
r
r
r
é
ë
ê
ê
ê
ê
ù
û
ú
ú
ú
ú
×
X
Y
Z
é
ë
ê
ê
ê
ê
ù
û
ú
ú
ú
ú
+
t
x
t
y
t
z
é
ë
ê
ê
ê
ê
ù
û
ú
ú
ú
ú
式中
T
t
x
t
y
t
z
为 平 移 向 量
R
为 旋 转 矩 阵
具体 为
r
φ
κ
φ
ω
κ
r
φ
κ
φ
ω
κ
r
φ
ω
r
ω
κ
r
ω
κ
r
ω
r
φ
κ
φ
ω
κ
r
φ
κ
φ
ω
κ
r
φ
ω
单位球 面 映 射
即 将 点
P
沿 射 线
O
P
方
向映射为单位球面
X
Y
Z
上的点
P
P
=
P
P
=
θ
α
θ
α
θ
式中
θ
为入射角
α
为入射光线在
X
Y
平面的投影
和
X
轴的夹角
故有
X
=
θ
α
=
X
+
Y
X
+
Y
+
Z
×
X
X
+
Y
X
X
+
Y
+
Z
Y
=
θ
α
=
X
+
Y
X
+
Y
+
Z
×
Y
X
+
Y
Y
X
+
Y
+
Z
Z
=
θ
=
Z
c
X
+
Y
+
Z
ì
î
í
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
球面投影
即按选定模型将点
P
投影至鱼眼
图像所在 平面
现有的球面 投影模型分 为
种
等距投影
等立体角投影
体视投影和正交投影
其
中
正交投影模型计 算 简单且可 建 立空间点 与 鱼眼
图像点的可 逆 变 换 关 系
本 文 选 用 该 投 影 模 型
如
图
所示
将点
P
正投影到一个与
Z
轴
鱼眼镜头
主光轴
垂直的固定平面
像平面
从而获得投影点
P
x
y
两者坐标变换关系如下
x
=
X
y
=
Y
图
正交投影模型
像素 坐 标 变 换
即 利 用 相 机 内 部 参 数 将 理
想投影点 坐 标 变 换 到 鱼 眼 图 像 像 素 坐 标
相 机 内
部参数 通 常 表 示 为 矩 阵
k
f
x
s u
f
y
v
考 虑
到鱼眼镜 头 光 学 畸 变
且 其 主 要 受 径 向 畸 变 误 差
影响
本文从理想投影点 到鱼眼图像 像素的坐 标 变
换关系为
F
x
u
-
u
+
u
=
f
x
×
x
F
y
u
-
v
+
v
=
f
y
×
y
{
式中
u
v
为 鱼 眼 图 像 像 素 坐 标
u
v
为 相 机
主点坐 标
f
x
和
f
y
为 等 效 相 机 焦 距
s
为 扭 曲 参
数
通常设为
k
和
k
为径向畸变系数
u
和
v
为像素点光学畸变
计算公式如下
剩余11页未读,继续阅读
2021-02-07 上传
2009-05-24 上传
2021-02-07 上传
2021-03-16 上传
2013-02-06 上传
2018-12-18 上传
105 浏览量
125 浏览量
2016-07-21 上传

weixin_38657139
- 粉丝: 9
- 资源: 955
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
