




强化学习与最优控制:MIT教材草案
需积分: 10 132 浏览量
更新于2024-07-16
收藏 2.85MB PDF 举报
"这是一本由麻省理工学院(MIT)的Dimitri P. Bertsekas教授编写的关于机器学习和强化学习的教材草案,名为《Reinforcement Learning and Optimal Control》。该书主要关注在计算上难以精确解决的大规模、多阶段决策问题,这些问题理论上可以通过动态规划(DP)来解决,但实际操作中计算复杂度极高。书中讨论了依赖于近似方法来生成次优策略,以确保在性能上达到合理水平的解决方案。此教材尚在完善中,可能会有错误,且对文献引用不全。读者可以向作者提供反馈和建议,最后修订日期为2019年2月6日。该书的信息和订购可通过Athena Scientific出版社的官方网站获取。"
在《Reinforcement Learning and Optimal Control》一书中,Bertsekas教授深入探讨了强化学习和最优控制的理论与实践。强化学习是人工智能的一个关键领域,它涉及智能代理通过与环境的交互来学习最优行为策略。该书将强化学习与经典的动态规划理论相结合,动态规划是解决多步决策问题的一种强大工具,尤其是在理论上的最优解。
书中的主要内容可能包括以下几个方面:
1. 强化学习基础:介绍强化学习的基本概念,如状态、动作、奖励函数和马尔可夫决策过程(MDP)。
2. 动态规划理论:详细阐述动态规划的基本原理,包括贝尔曼方程和价值迭代、策略迭代等算法。
3. 近似方法:由于大规模问题的复杂性,书中会讨论如何使用近似动态编程(ADP)和函数逼近技术来求解近似最优策略。
4. 学习策略:涵盖Q-learning、SARSA等在线学习算法,以及深度强化学习(Deep RL)中使用的神经网络模型。
5. 实时决策问题:讨论在实际环境中,如何处理部分可观测性和不确定性,以及如何设计稳健的控制策略。
6. 最优控制理论:结合经典控制理论,如线性二次型最优控制(LQR)和Lyapunov稳定性分析,解释如何在动态系统中实现最优控制。
7. 应用案例:可能会包含来自实际领域的案例研究,如机器人控制、资源管理或游戏策略,以展示理论在实际问题中的应用。
8. 数值方法与算法:详细描述数值计算技巧和实现算法,以便读者能够理解和实现这些方法。
这本书对于想要深入理解强化学习和最优控制理论,以及在实际问题中应用这些理论的学者和工程师来说,是一份宝贵的资源。通过阅读和学习,读者可以掌握如何在无法精确求解的复杂问题中设计有效的智能决策策略。

Sec. 1.1 Deterministic Dynamic Programming 3
...
...
Control u
k
k
Cost g
k
(x
k
, u
k
)
) x
k
x
k+1
+1
x
N
Stage k
k Future Stages
) x
0
Future Stages Terminal Cost
Future Stages Terminal Cost g
N
(x
N
)
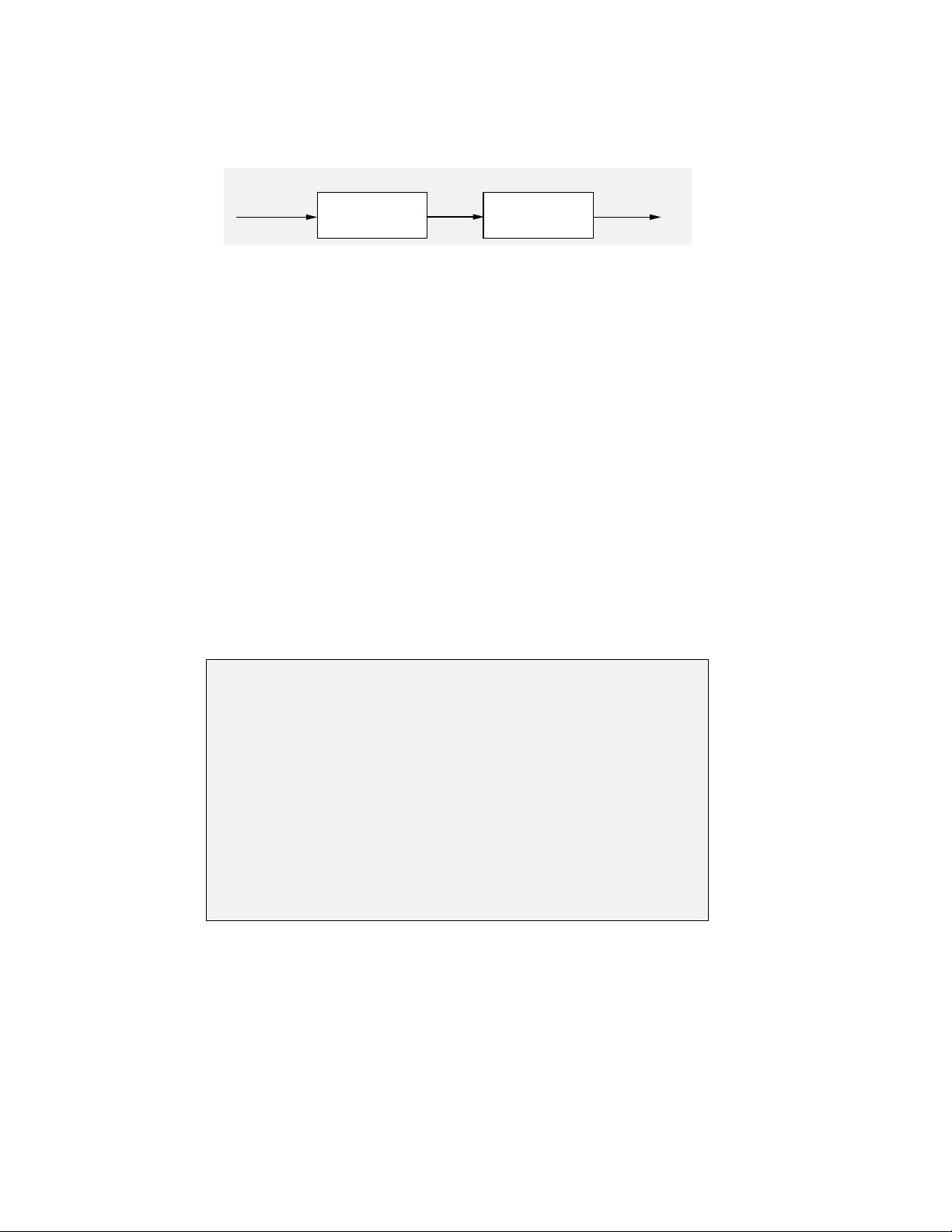
Figure 1.1.1 Illustration of a deterministic N-stage optimal control problem.
Starting from state x
k
, the next state under control u
k
is generated nonrandomly,
according to
x
k+1
= f
k
(x
k
, u
k
),
and a stage cost g
k
(x
k
, u
k
) is incurred.
f
k
is a function of (x
k
, u
k
) that describes the mechanism by which the
state is updated from time k to time k + 1.
N is the horizon or number of times control is applied,
The set of all possible x
k
is called the state space at time k. It can be
any set and can depend on k; this generality is one of the great strengths
of the DP methodology. Similarly, the set of all possible u
k
is called the
control space at time k. Again it can be any set and can depend on k.
The problem also involves a cost function that is additive in the se nse
that the cost incurred at time k, denoted by g
k
(x
k
, u
k
), accumulates over
time. Formally, g
k
is a function of (x
k
, u
k
) that takes real number values,
and may depend on k. For a given initial state x
0
, the total cost of a control
sequence {u
0
, . . . , u
N−1
} is
J(x
0
; u
0
, . . . , u
N−1
) = g
N
(x
N
) +
N−1
X
k=0
g
k
(x
k
, u
k
), (1.2)
where g
N
(x
N
) is a terminal cost incurred at the end of the pr ocess. This
cost is a well-defined number, since the control sequence {u
0
, . . . , u
N−1
}
together with x
0
determines exactly the state sequence {x
1
, . . . , x
N
} via
the system eq uation (1.1). We want to minimize the cost (1.2) over all
sequences {u
0
, . . . , u
N−1
} that satisfy the control constraints, thereby ob-
taining the optimal value†
J
*
(x
0
) = min
u
k
∈U
k
(x
k
)
k=0,...,N −1
J(x
0
; u
0
, . . . , u
N−1
),
as a function of x
0
. Figure 1.1.1 illustrates the main elements of the prob-
lem.
We will next illustrate deterministic problems with some examples.
† We use t hroughout “min” (in place of “inf”) to indicate minimal value over
a feasible set of controls, even when we are not sure that the minimum is attained
by some feasible control.


剩余283页未读,继续阅读
点击了解资源详情
130 浏览量
171 浏览量
2021-05-10 上传
2021-04-18 上传
109 浏览量
107 浏览量
2025-04-10 上传
2025-04-10 上传

fuwell
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开








最新资源
- Oracle财务系统培训:详解应付账款处理
- 郑君里《信号与系统》第二版习题详解
- 封装iOS滑动选择器组件,助力金融类应用金额选择
- 探索HelloAndroid:安卓应用开发实战源码剖析
- 探索QQ会员登陆GTK算法的核心机制
- Ruby基础:构建CRUD Web应用bitfolio指南
- Oracle财务系统应用基础培训教程
- SQL Server 2000 JDBC驱动及JTDs包下载
- 和众物流管理软件v1.0:陆运物流企业的操作与财务工具
- FLASH游戏制作课件:生动且实用的教学工具
- Android源码学习资料下载指南
- Python Plotly-Dash实现全球恐怖主义仪表板教程
- 自定义标题的滑动菜单视图iOS组件
- 使用jtopo插件实现自动拓扑生成的案例解析
- JSP网上书店开发教程完整案例分析
- 安卓游戏引擎开发:实现与源码解析






















