PyBullet快速上手指南
需积分: 42 54 浏览量
更新于2024-07-17
1
收藏 1.54MB PDF 举报
"PyBullet快速入门手册,由Erwin Coumans和Yunfei Bai于2017/2018年编写,是学习和理解PyBullet库的实用指南。该资源涵盖了PyBullet的基础和高级功能,包括机器人控制、合成相机渲染、碰撞检测查询、逆动力学与运动学、强化学习环境、虚拟现实应用、调试图形界面以及构建和安装PyBullet等主题。"
PyBullet是一个开源的物理模拟引擎,主要设计用于快速原型、机器人仿真和机器学习。以下是对PyBullet关键知识点的详细说明:
1. **介绍**:PyBullet提供了一个简单易用的Python接口,允许用户创建和操作复杂的物理世界。它支持多种文件格式,如URDF、SDF和MJCF,用于导入机器人模型。
2. **连接与断开**:`connect()`函数用于建立到PyBullet服务器的连接,而`disconnect()`则用于关闭连接。设置重力可以使用`setGravity()`函数。
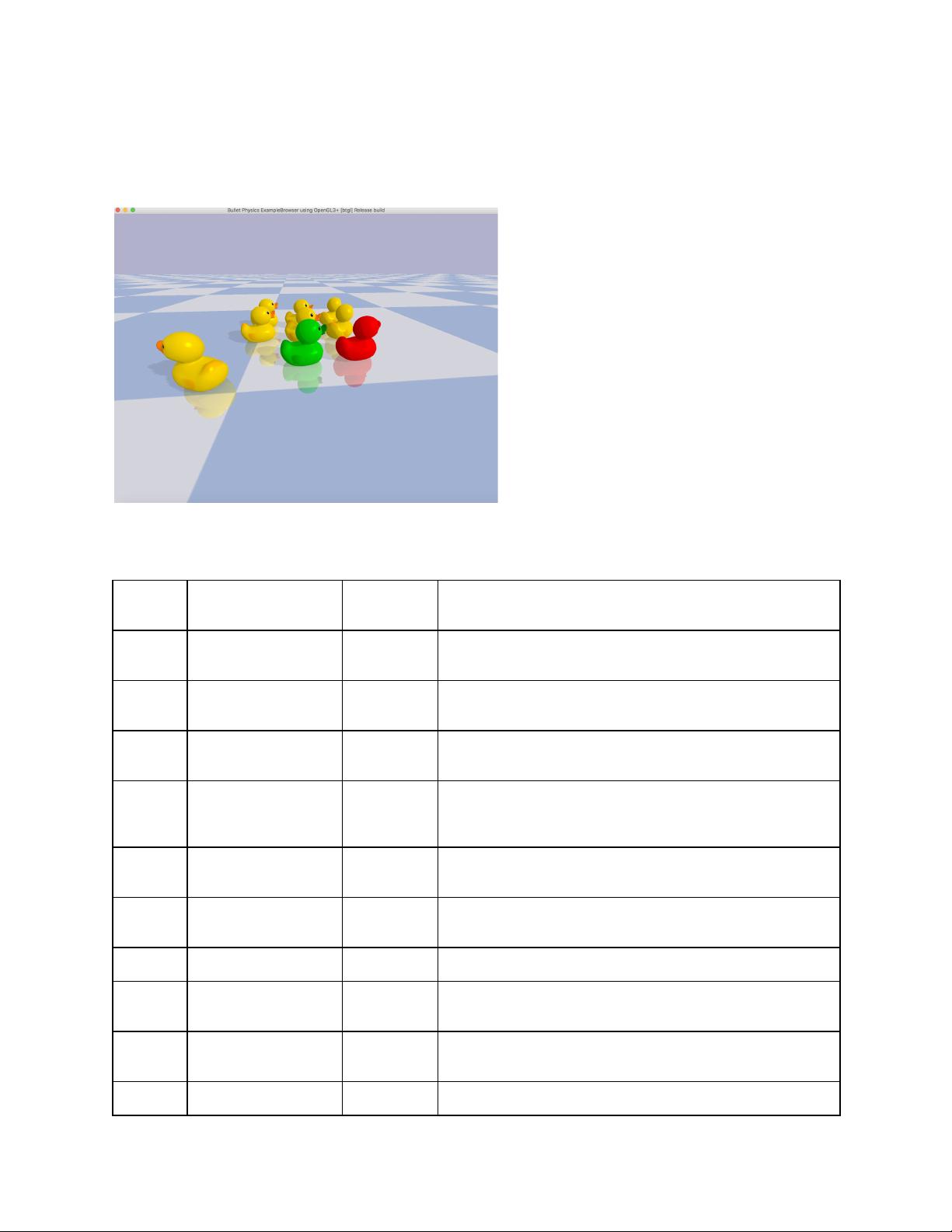
3. **加载模型**:通过`loadURDF()`, `loadSDF()`, `loadMJCF()`函数,你可以加载不同的机器人或物体模型进入仿真环境。
4. **保存与恢复**:使用`saveWorld()`, `saveState()`, `saveBullet()`可以保存当前状态,`restoreState()`用于恢复之前保存的状态。
5. **碰撞检测**:PyBullet提供了碰撞检测查询功能,可检查物体间的碰撞,这对于机器人避障和其他碰撞相关的应用场景至关重要。
6. **逆动力学与运动学**:逆动力学用于根据期望的关节力计算出所需的关节运动,运动学则涉及如何从关节角度计算物体的位置和速度。
7. **强化学习Gym环境**:PyBullet与OpenAI Gym兼容,可以创建强化学习的仿真环境,便于进行智能体训练。
8. **虚拟现实**:PyBullet支持虚拟现实(VR)接口,用户可以佩戴VR设备直接与模拟环境交互。
9. **调试图形界面**:`debug GUI, lines, Text, Parameters`提供了丰富的可视化工具,帮助开发者调试和理解仿真过程。
10. **创建形状和物体**:使用`createCollisionShape`和`createVisualShape`来定义物体的几何形状,`createMultiBody`用于创建带有这些形状的多体对象。
11. **模拟步进**:`stepSimulation()`函数是执行物理模拟的关键,它按时间步进推进仿真。
12. **实时模拟**:`setRealTimeSimulation()`允许在实时模式下运行仿真,使得交互更为流畅。
13. **位置与姿态**:`getBasePositionAndOrientation`和`resetBasePositionAndOrientation`分别用于获取和设置物体的基座位置和方向。
14. **传感器与控制**:PyBullet支持关节力/扭矩传感器,并提供`setJointMotorControl2/Array`来控制关节运动。
15. **状态获取**:`getJointState(s)`和`resetJointState`用于获取和重置关节状态,`getLinkState`则获取链接(如机器人手臂)的状态。
16. **速度与加速度**:`getBaseVelocity`和`resetBaseVelocity`用于处理基座的速度和加速度,`applyExternalForce/Torque`可以施加外部力和扭矩。
17. **身体与约束**:`getNumBodies`, `getBodyInfo`, `getBodyUniqueId`, `removeBody`管理仿真中的物体,`createConstraint`和`removeConstraint`创建和移除约束,如连杆或绳索。
18. **约束与信息**:`getNumConstraints`, `getConstraintUniqueId`用于处理约束,`getConstraintInfo/State`获取约束的状态。
19. **动力学属性**:`getDynamicsInfo`和`changeDynamics`函数用于获取和修改物体的动力学属性,如质量、惯量和摩擦系数。
20. **时间步长**:`setTimeStep`设置物理模拟的时间步长,影响模拟精度和性能。
21. **物理引擎参数**:`setPhysicsEngineParameter`允许调整引擎参数以优化仿真性能。
22. **重置仿真**:`resetSimulation`函数将整个仿真环境重置到初始状态。
此外,PyBullet还支持状态日志记录、多线程和分布式计算等功能,使得它成为研究和开发中强大的工具。通过这个快速入门指南,用户可以快速掌握PyBullet的基本用法,进一步深入到复杂的物理模拟和机器学习应用中。
11
shape will parse some parameters from the material file (.mtl) and load a texture. Note that large
textures (above 1024x1024 pixels) can slow down the loading and run-time performance.
See examples/pybullet/examples/addPlanarReflection.py and createVisualShape.py
The input parameters are
required
shapeType
int
GEOM_SPHERE, GEOM_BOX, GEOM_CAPSULE,
GEOM_CYLINDER, GEOM_PLANE, GEOM_MESH
optional
radius
float
default 0.5: only for GEOM_SPHERE, GEOM_CAPSULE,
GEOM_CYLINDER
optional
halfExtents
vec3 list of 3
floats
default [1,1,1]: only for GEOM_BOX
optional
length
float
default: 1: only for GEOM_CAPSULE, GEOM_CYLINDER
(length = height)
optional
fileName
string
Filename for GEOM_MESH, currently only Wavefront .obj.
Will create convex hulls for each object (marked as 'o') in the
.obj file.
optional
meshScale
vec3 list of 3
floats
default: [1,1,1],only for GEOM_MESH
optional
planeNormal
vec3 list of 3
floats
default: [0,0,1] only for GEOM_PLANE
optional
flags
int
unused / to be decided
optional
rgbaColor
vec4, list of
4 floats
color components for red, green, blue and alpha, each in
range [0..1].
optional
specularColor
vec3, list of
3 floats
specular reflection color, red, green, blue components in
range [0..1]
optional
visualFramePosition
vec3, list of
translational offset of the visual shape with respect to the link

剩余65页未读,继续阅读
2024-01-23 上传
2023-09-29 上传
2024-11-29 上传
2023-07-27 上传
2023-12-22 上传
2024-01-26 上传
2023-02-19 上传

zxxRobot
- 粉丝: 2531
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- FTP文件传输协议(标准版)
- 《计算机系统结构-量化研究方法》
- 基于AHP和系统仿真的面向服务业务过程性能评价
- 使用Microsoft Agent的COM接口编程
- spring技术操作指南(完全中文版)
- The C Book
- 基于AHP模型的政府系统职能评价方法的研究
- 表面裂纹三维表面裂纹的应力强度因子
- C_C++指针经验总结
- 我的积累 aix语法
- 戏说面向对象程序设计C#版.pdf
- 。。。。。。。。。。。。。lingo入门教程。。。。。。。。。。。
- Java Web中的入侵检测及简单实现
- 设计之道(oop)--张逸著
- wincvsinstall.pdf
- Delphi+access仓库管理系统论文
