STM32F405驱动下的旋转倒立摆控制系统详解
需积分: 50 196 浏览量
更新于2024-09-07
15
收藏 975KB PDF 举报
"旋转倒立摆方案是一个综合性的电赛项目,其核心是利用STM32F405单片机作为控制系统的核心控制器,实现了倒立摆的精确控制。方案设计主要包括以下几个关键部分:
1. 系统结构:该系统由机械装置(包括旋转臂、摆杆和机座)、角度检测模块、直流伺服电机以及控制单元组成。整个系统通过STM32F405单片机协调各个组件,其中旋转臂是通过直流伺服电机来驱动的,这使得系统具备了快速响应和精确控制的能力。
2. 电机选择:三种备选方案中,步进电机和数字舵机虽然易于控制,但由于响应速度不足,不适合高速旋转的要求。最终,选择了直流伺服电机,因为它们能提供连续且精准的速度和位置控制,满足系统的高精度需求。
3. 摆杆状态检测:方案采用了高分辨率编码盘、惯性测量元件(陀螺仪和加速度计)以及具有模拟电压输出的绝对位置传感器。编码盘用于直接测量角度位移,陀螺仪和加速度计则结合使用,既能检测角度又能测速,确保摆杆状态的准确性。
4. 控制策略:系统采用了能量反馈控制原理,使倒立摆能够在起摆后保持稳定。此外,还应用了线性二次型最优控制算法(LQR),这是一种优化控制方法,旨在最小化系统误差,确保倒立摆的精确控制性能。
5. 实验验证:通过详细的实验数据分析,证明了该系统在功能上达到了电赛题目所设定的要求,各项指标表现良好,适合作为电赛训练和学习的参考案例。
总结起来,这个旋转倒立摆方案不仅展示了单片机在控制领域的应用,还涉及到了传感器选择、电机控制策略和高级控制算法的实践,是一次深入理解机电一体化和控制系统设计的实战项目。"
1
简易旋转倒立摆及控制装置
摘要:本系统采用 STM32F405 单片机作为控制核心,通过角度传感器检测倒立
摆摆杆的位置状态,基于能量反馈控制原理调节直流电机,直流电机带动旋转臂
驱动摆杆,实现简易倒立摆的起摆功能。倒立摆起摆后,采用线性二次型最优控
制算法对倒立摆进行控制,稳定倒立摆的倒立状态。测试表明,本系统各项功能
都已达到或超过本题目要求。
关键词:旋转倒立摆;能量反馈控制;线性二次型最优控制(LQR)
一、 方案论证与比较
1. 系统结构
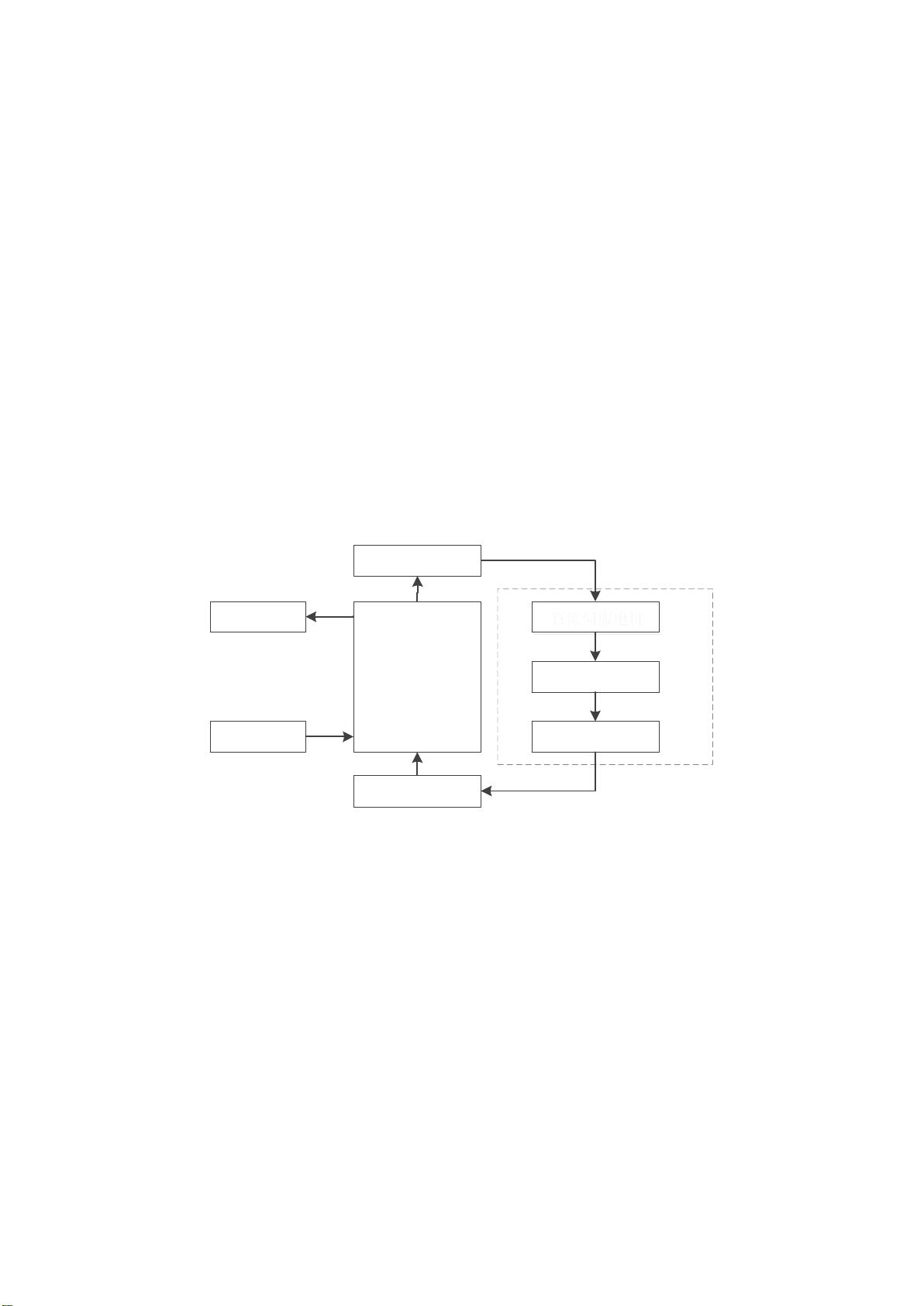
本系统主要由旋转倒立摆机械装置、摆杆角度检测部分、直流伺服电机以及
控制器部分组成,其中旋转倒立摆装置机械结构主要由旋转臂、摆杆和机座等组
成。系统整体框图如图 1 所示。
显示模块
键盘模块
主控制器
STM32F405
摆杆角度检测
电机驱动
直流伺服电机
旋转臂
摆杆
旋
转
倒
立
摆
装
置
带动
带动
图 1 系统整体框图
2. 电机选择方案
方案一:使用步进电机带动旋转臂转动。步进电机控制算法简单,对步进电
机施加连续激励信号可以驱动步进电机实现连续转动。
方案二:使用可 360 度控制的数字舵机带动旋转臂转动。数字舵机控制简单,
输出力矩大,位置控制精准。
方案三:使用直流伺服电机带动旋转臂转动。直流伺服电机只要有驱动电压
即能实现连续的转动,配有编码盘的直流电机配合合适的电机控制算法能实现精
准的速度和位置控制,能够驱动旋转臂部分精确转动。
方案一和方案二的电机控制都很简单,但本系统需要具有高响应速度的电机
带动旋转臂,普通的步进电机和数字舵机响应速度都不快,而同样价位的直流电
机可以达到很好的响应速度。经比较,本系统使用直流伺服电机作为旋转臂的旋
下载后可阅读完整内容,剩余9页未读,立即下载
2954 浏览量
470 浏览量
2021-09-25 上传
157 浏览量
103 浏览量
2024-09-02 上传
2017-05-08 上传
134 浏览量

ZLI960117
- 粉丝: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++实现的注册表锁定与解锁函数
- IDL编程入门与实践:数据可视化分析
- 李建忠与侯捷:面向对象设计与应对复杂性的策略
- C++编写的多宿舍局域网聊天信使源码
- C++ U盘程序源码:基础文件传输与字符串操作
- Linux命令全览:cat、cd与chmod详解
- Sniffer中文教程:网络协议分析与故障解决
- Windows文件属性操作详解:包括隐藏、只读等设置
- C语言在嵌入式系统中的应用与挑战
- Web浏览器历史与AJAX基础
- SQL Server 设计与编码规范详解
- C#新版设计模式详解:从单例到访问者模式
- IAR EWARM入门教程:轻松开发ARM7应用
- Oracle函数参考指南
- Java编程入门:理解变量与类型
- 思科网络工程师认证实战指南
