神经网络分布式自适应航天器编队姿态同步控制
130 浏览量
更新于2024-08-27
收藏 1.37MB PDF 举报
"这篇研究论文探讨了基于神经网络的分布式自适应航天器编队姿态同步控制,采用修改后的快速终端滑模(MFTSM)方法应对未知外部干扰问题。"
文章详细介绍了在航天器编队飞行(SFF)中,如何解决由于未知外部干扰导致的姿态同步控制挑战。作者Lin Zhao和Yingmin Jia提出了一种新颖的多航天器修改版快速终端滑模控制策略。这种MFTSM设计旨在避免奇异性问题,并结合快速终端滑模(FTSM)的优点,提供更快的收敛速度。
文章的关键创新点在于结合了MFTSM和神经网络(NN)逼近技术,提出了一种带有自适应调整法则的分布式MFTSM控制律。这种控制策略允许每个航天器根据自身状态和邻近航天器的信息,动态调整其控制输入,以实现整个编队的姿态同步。
此外,论文还考虑了输入约束问题,即航天器在执行控制任务时可能会遇到的实际限制。在这种情况下,提出的控制方法仍然能够确保系统的稳定性和性能,同时避免违反这些约束。
关键词包括:航天器编队飞行、姿态同步、终端滑模、神经网络以及输入约束,表明该研究涵盖了航天工程中多个关键领域。通过神经网络的学习能力和滑模控制的鲁棒性,该方法能够适应复杂环境并处理不确定性,对于实际航天任务具有重要的应用价值。
文章经过多次修订,最终于2015年6月被接受发表,表明了其在学术界的严谨性和重要性。由Long Cheng通信,进一步确认了该研究在航天控制领域的专业性和影响力。
within a unit sphere. Consequently, the global rotation represen-
tation without singularity can be guaranteed. Therefore, in order to
avoid the singularity problem, MRPs q
i
and its shadow counterpart
q
i
s
are utilized to represent attitude rotation in this paper. By virtue
of switching between MRPs q
i
and its shadow counterpart q
i
s
,we
have J q
i
J r 1. It should be further pointed out that MRPs q
i
and its
shadow counterpart q
i
s
represent the same rotation [42].
Denote P
i
ðq
i
Þ¼T
i
ðq
i
Þ
1
, after taking the time derivative of
(2) and premultiplying both sides of the resulting expression by
T
i
ðq
i
Þ
T
J
i
T
i
ðq
i
Þ
1
, we obtain the following equation:
J
n
i
ðq
i
Þ
€
q
i
þC
n
ðq
i
;
_
q
i
Þ
_
q
i
¼u
i
þd
i
ð5Þ
where
J
n
ðq
i
Þ¼P
i
ðq
i
Þ
T
J
i
P
i
ðq
i
Þ
C
n
ðq
i
;
_
q
i
Þ¼J
n
ðq
i
Þ
_
P
i
ðq
i
Þ
1
P
i
ðq
i
ÞP
i
ðq
i
Þ
T
ðJ
i
P
i
ðq
i
Þ
_
q
i
Þ
P
i
ðq
i
Þ
u
i
¼P
i
ðq
i
Þ
T
u
i
; d
i
¼P
i
ðq
i
Þ
T
d
i
Suppose that there exists a leader, labeled as spacecraft 0,
whose attitude is the time-varying reference attitude q
d
for the
whole group of spacecraft, and q
d
represents the leader's MRPs
together with their shadow set. In order to facilitate the control
development, the following assumptions and properties are made
about attitude dynamics systems:
Assumption 1.
_
q
d
;
€
q
d
are assumed to be bounded.
Assumption 2. There exists an unknown constant d
n
i
such that d
i
satisfies J d
i
J r d
n
i
.
Property 1. The inertia matrix J
n
i
is symmetric and positive, which is
also bounded as J
n
imin
‖x‖
2
r x
T
J
n
i
xr J
n
imax
‖x‖
2
; 8xA R
3
; where
J
n
imin
; J
n
imax
are positive constants.
Property 2 (Wong et al. [39]). The matrix
_
J
n
i
2C
n
i
satisfies the
skew-symmetric relationship for all i's. Therefore,
x
T
ð
_
J
n
i
2C
n
i
Þx ¼ 0; 8x A R
3
, where
_
J
n
i
is the time derivative of J
n
i
.
0 50 100 150
−1
0
1
0 50 100 150
−1
0
1
q
d
,q
i
,i=1,...,6
0 50 100 150
−0.5
0
0.5
1
Time (s)
q
1
q
2
q
3
q
4
q
5
q
6
q
d
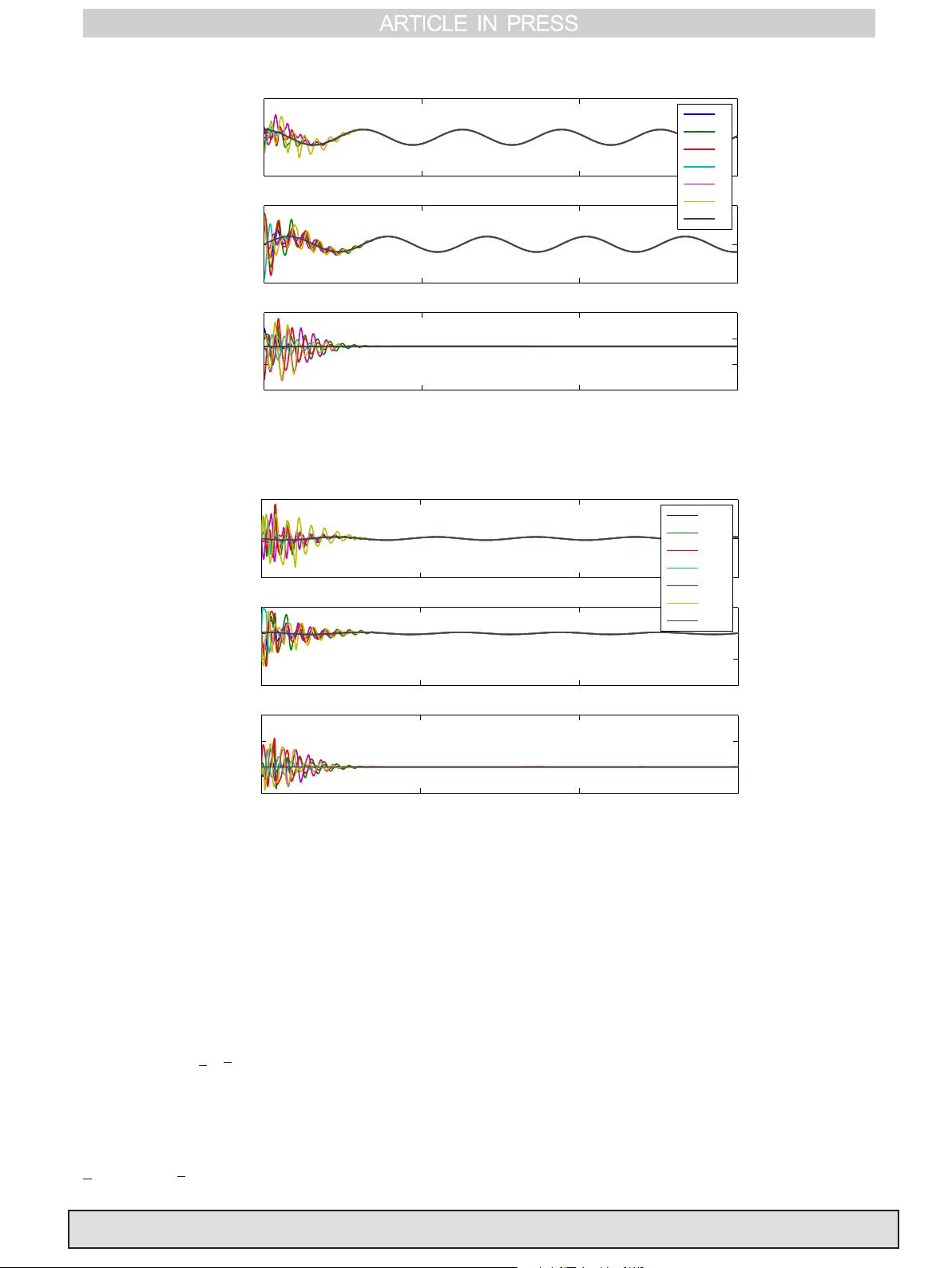
Fig. 2. Case 1: Response curves of q
d
and q
i
; i ¼1; …; 6.
0 50 100 150
−1
0
1
0 50 100 150
−2
−1
0
1
dq
d
/dt,dq
i
/dt,i=1,...,6
0 50 100 150
−1
0
1
2
Time (s)
dq
1
/dt
dq
2
/dt
dq
3
/dt
dq
4
/dt
dq
5
/dt
dq
6
/dt
dq
d
/dt
Fig. 3. Case 1: Response curves of
_
q
d
and
_
q
i
; i ¼1; …; 6.
L. Zhao, Y. Jia / Neurocomputing ∎ (∎∎∎∎) ∎∎∎–∎∎∎ 3
Please cite this article as: L. Zhao, Y. Jia, Neural network-based distributed adaptive attitude synchronization control of spacecraft
formation under modified fast terminal sliding mode, Neurocomputing (2015), http://dx.doi.org/10.1016/j.neucom.2015.06.063i
剩余11页未读,继续阅读
222 浏览量
225 浏览量
141 浏览量
108 浏览量
2021-02-11 上传
120 浏览量
127 浏览量
2021-02-21 上传
2021-09-23 上传

weixin_38684328
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小学水墨风学校网站模板设计
- 深入理解线程池的实现原理与应用
- MSP430编程代码集锦:实用例程源码分享
- 绿色大图幻灯商务响应式企业网站开发源码包
- 深入理解CSS与Web标准的专业解决方案
- Qt/C++集成Google拼音输入法演示Demo
- Apache Hive 0.13.1 版本安装包详解
- 百度地图范围标注技术及应用
- 打造个性化的Windows 8锁屏体验
- Atlantis移动应用开发深度解析
- ASP.NET实验教程:源代码详细解析与实践
- 2012年工业观察杂志完整版
- 全国综合缴费营业厅系统11.5:一站式缴费与运营管理解决方案
- JAVA原生实现HTTP请求的简易指南
- 便携PDF浏览器:随时随地快速查看文档
- VTF格式图片编辑工具:深入起源引擎贴图修改
