视觉SLAM简介:自主导航与环境建图
需积分: 9 86 浏览量
更新于2024-07-20
收藏 4.32MB PDF 举报
"Visual SLAM——一个简短的介绍"
Visual SLAM(视觉SLAM)是机器人定位与建图领域的核心技术,由英文“Simultaneous Localization And Mapping”缩写而来。SLAM的主要目标是在未知环境中构建地图的同时,实时估计移动机器人的位置。这一技术在自主导航和运动规划中扮演着关键角色。
SLAM可以使用多种传感器实现,如2D激光测距仪、RGB-D相机(彩色深度相机)和3D激光雷达。不同传感器各有优缺点:激光雷达提供高精度但体积较大,被动式感知如视觉传感器则轻便节能且应用广泛。自2005年以来,视觉SLAM(VSLAM)因其主要依赖视觉传感器(摄像头)而受到广泛关注。
视觉SLAM作为其他传感器的补充,常常与GPS、IMU(惯性测量单元)、激光测距仪等结合使用。这使得它能在没有GPS信号的环境中工作,例如室内、洞穴、火星或月球等。视觉SLAM的输入是视频摄像头捕获的图像,通过这些图像,系统可以构建3D地图并实时估计摄像头的自身位姿。
在实际操作中,视觉SLAM面临的挑战包括:特征提取与匹配、卡尔曼滤波或粒子滤波等估计方法的应用、实时性处理、环境变化的适应性以及鲁棒性问题。特征提取是识别图像中的关键点,用于匹配不同帧间的相似结构;而滤波器则用于平滑和优化估计结果,降低噪声影响。
SLAM算法大致可以分为两类:基于特征的SLAM和直接法SLAM。基于特征的SLAM着重于提取和匹配图像中的显著特征,如SIFT、SURF或ORB等;直接法SLAM则直接处理像素级的亮度信息,不依赖于特征点,对光照变化和动态背景有较好的适应性。
在实际应用中,SLAM技术已广泛应用于无人机自主飞行、自动驾驶汽车、服务机器人、增强现实等领域。随着深度学习和硬件技术的发展,SLAM算法的性能和效率持续提升,未来有望在更多领域发挥重要作用。
视觉SLAM是一种结合了计算机视觉和机器人定位的先进技术,它通过摄像头数据实时构建环境模型和自我定位,对于无人系统的自主导航至关重要。尽管存在诸多挑战,但其广泛的应用前景和持续的技术创新使其成为研究的热点。
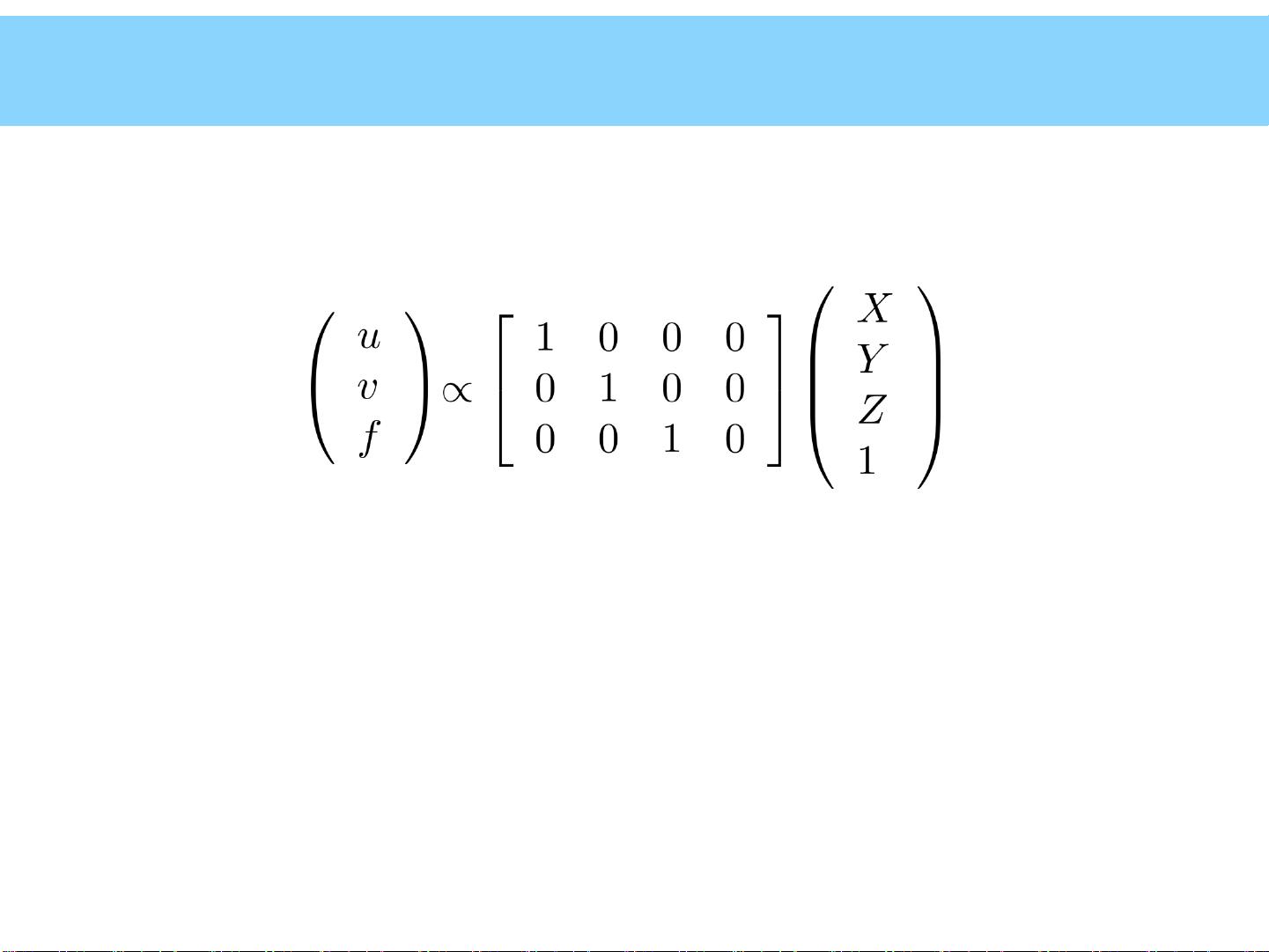
Pinhole camera model
• We have
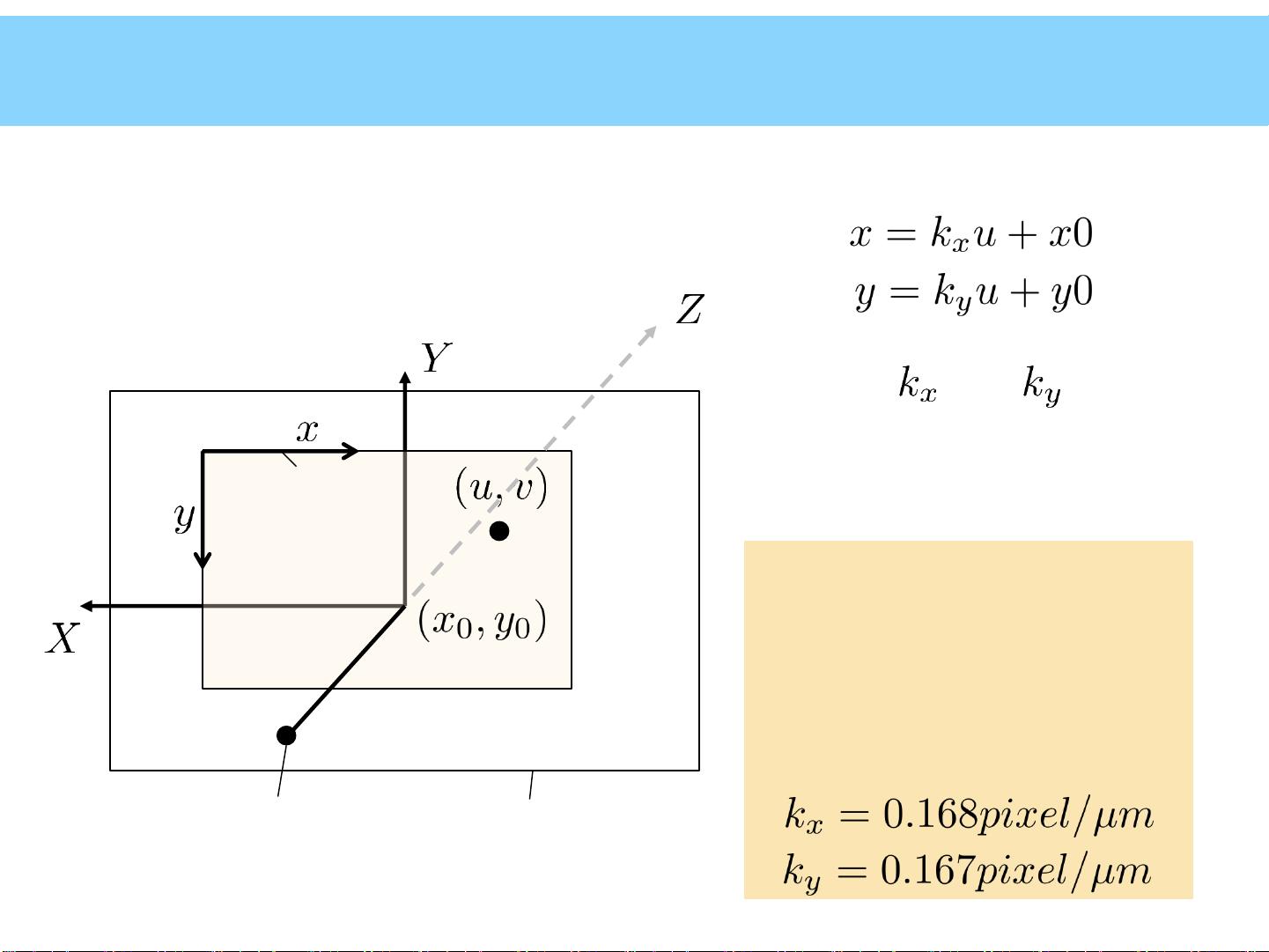
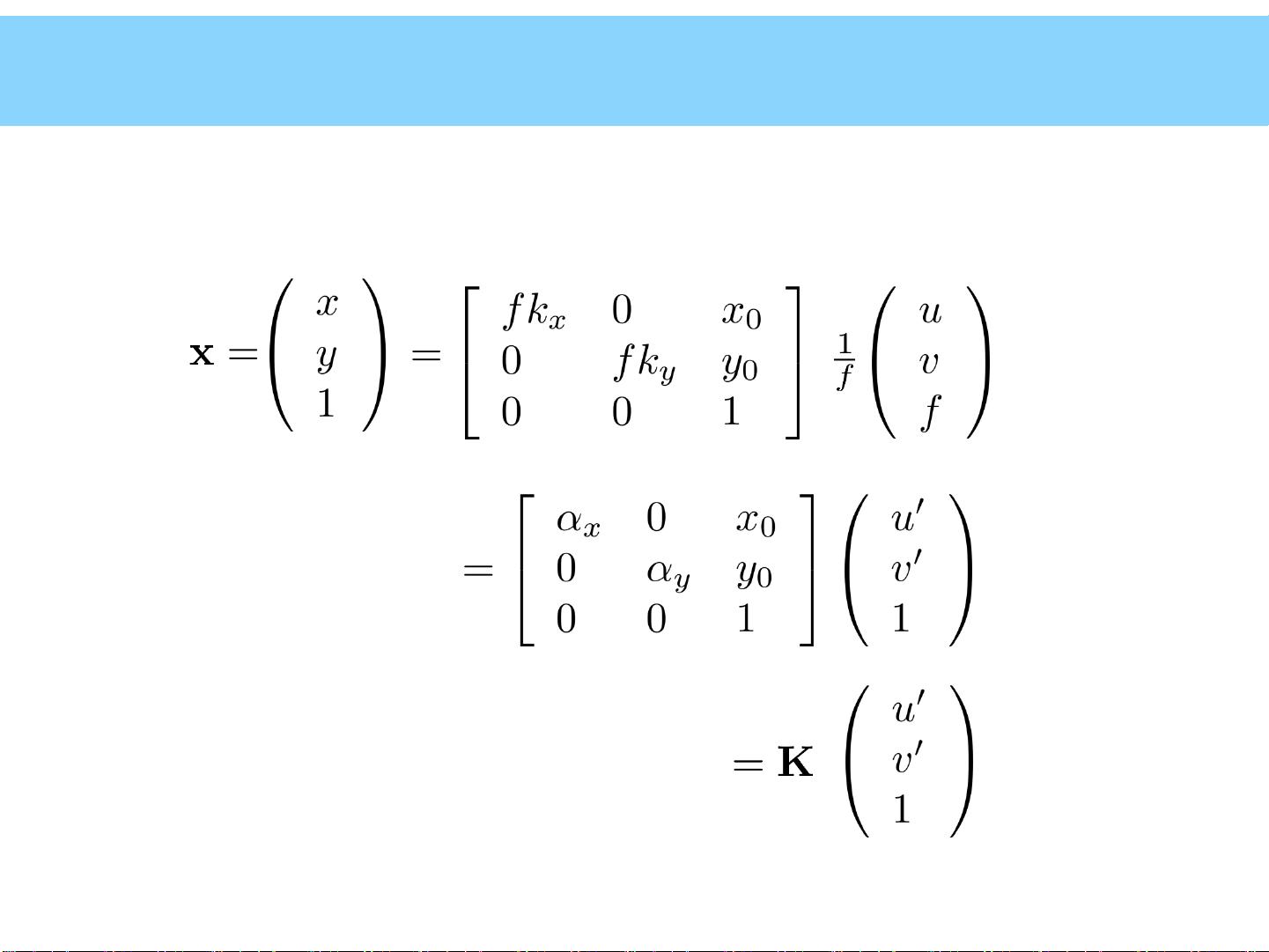
• Normalized image point will be then sensed by CCD
or CMOS :
– Next step: Image plane -> Sensor frame
Danping Zou @Shanghai Jiao Tong University
image point
scene point
3x4 projection matrix
剩余86页未读,继续阅读
2021-02-04 上传
2015-05-18 上传
2021-05-27 上传
2022-07-15 上传
2019-06-06 上传
2018-07-04 上传
2020-03-26 上传

若谷虚怀
- 粉丝: 64
- 资源: 240
 我的内容管理
展开
我的内容管理
展开







最新资源
- Coursera PL Peer Assess-crx插件
- 逆波兰计算器(polishcal)的改进文件
- 美味餐厅
- app
- OS-Memory-Allocation-Algorithms-Simulation:此存储库中包含的两个程序模拟了Buddy系统,First Fit,Next Fit,Best Fit和Worst Fit内存分配算法,这些算法在许多操作系统中使用。 树数据结构用于伙伴系统的实现,其中使用了两个独立的双链表来保持Kong的记录以及在首次拟合,下一步拟合,最佳拟合和最差拟合算法的情况下分配给进程的内存模拟。 伙伴系统是一种内存分配和管理算法,它以两个增量的幂来管理内存。 在第一个配合中,方法是分配足够大的第
- matlab二值化处理的代码-craquelure-graphs:从图像中提取和表征裂纹图案
- 2024年最新行政区划数据库
- Homework
- HRRecruitApp:使用Spring 5用Java编写的简单人力资源招聘应用程序
- fooddesk-app
- Boomi Tools-crx插件
- silverstripe-sessionmessenger:Silverstripe(基于框架和CMS)的基于会话的消息传递模块
- BlazorCRUD:使用 EF Core 和 .Net 5 的 Blazor 服务器端 CRUD 应用程序
- 毕业设计&课设-基于MATLAB的硬球填料蒙特卡罗模拟.zip
- OS-Encryption-Decryption-Manager:使用仿射和Vigenere Cipher项目进行操作系统安全性加密和解密
- VizgeneMERlinDataAnalysis:Vizgene MERFISH数据的分析脚本
