ADAMS与MATLAB联合仿真教程:机械夹紧机构建模
"ADAMS与Matlab联合仿真,机械夹紧机构建模实例"
在ADAMS与Matlab联合仿真的过程中,主要涉及以下几个关键知识点:
1. **ADAMS与MATLAB的联合仿真**:这是两种软件协同工作的技术,ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一个用于多体动力学分析的软件,而MATLAB则是一个强大的数值计算和数据分析平台。通过联合仿真,用户可以在MATLAB中设计和控制复杂的动态系统,如机械夹紧机构,然后利用ADAMS进行物理行为的模拟。
2. **创建机械系统模型**:以偏心连杆模型为例,首先需要在ADAMS中建立机械模型,包括各个部件如摇臂、手柄、锁钩、连杆和固定块。这涉及到几何构件的创建、约束条件的设定以及物理参数的配置。
3. **模型参数设置**:在ADAMS中,模型参数设置至关重要,它涉及到物理量单位的设定(如【描述】中提到的【Settings】→【Units】)和工作网格的调整(如【描述】中提到的【Settings】→【WorkingGrid】)。这些参数直接影响到仿真结果的准确性。
4. **MATLAB控制模型**:在MATLAB中,基于ADAMS导出的模块,可以创建控制系统。例如,通过Simulink建立与ADAMS模型相连接的控制逻辑,实现对模型的外部输入和输出控制。这允许用户在MATLAB环境中直接操作ADAMS模型,并获取仿真数据。
5. **结果后处理**:仿真完成后,结果通常需要在MATLAB中进行后处理,包括数据解析、图表绘制、性能评估等。这有助于用户理解模型的动态行为,优化设计或验证理论分析。
在机械夹紧机构的建模实例中,具体步骤如下:
- **创建几何构件**:从ADAMS的零件库中选取适当的几何形状,如点、平板等,来构建夹紧机构的各个组件。设计点作为定位和形状设计的基础。
- **添加约束**:约束定义了各部件之间的相对运动关系。例如,通过选择特定设计点,可以添加铰链约束(如摇臂的旋转)或滑动约束(如连杆的移动)。
- **添加载荷**:在模型上施加外力,如在手柄上施加作用力,以模拟实际操作情况。载荷可能包括力、速度、加速度等。
- **结果后处理**:在ADAMS或MATLAB中分析仿真结果,如观察各部件的运动轨迹、力的分布、应力变化等,以评估机构是否满足设计要求,如夹紧力至少为800N,手柄力不超过80N等。
通过这个实例,用户不仅可以学习ADAMS的基本操作,还能掌握如何在MATLAB中实现对复杂机械系统的控制和分析,提升联合仿真的应用能力。
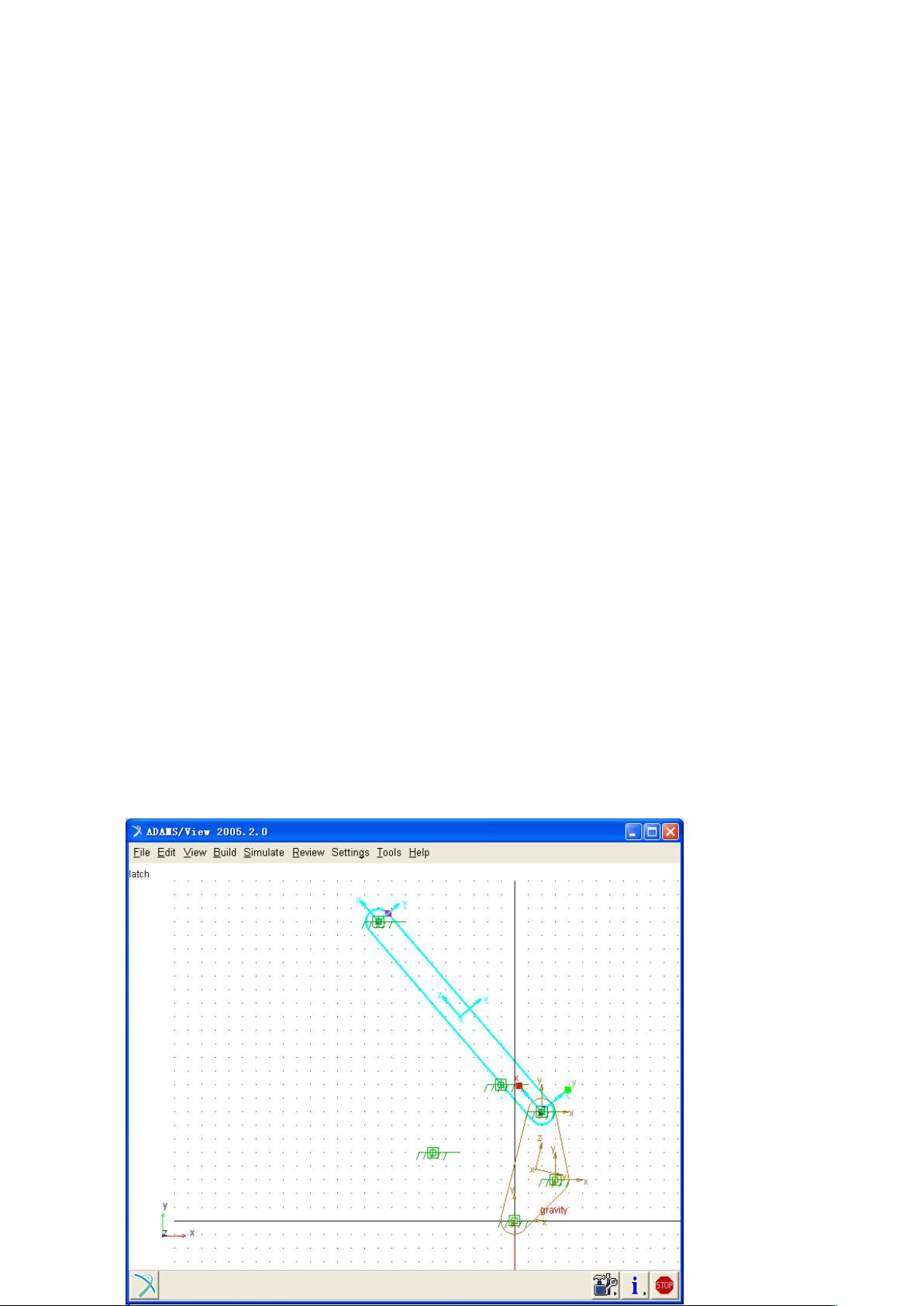
图 7-7 创建摇臂
5、创建手柄(Handle)
选择并点击几何模型库(Geometric Modeling)中的连杆(Link),用鼠标左键选择设计点 :
Point_3 和 Point_4,完成手柄(Handle)的创建,将其重新命名(Rename)为 Handle,如图 7-8
所示:
剩余19页未读,继续阅读
431 浏览量
402 浏览量
557 浏览量
132 浏览量
2024-01-08 上传
2024-01-08 上传
132 浏览量

LHJFYYCH
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 桃桃_信息熵函数_
- 异步操作测试.zip
- Titration: Project Tracking Application-开源
- 消费日志:SpendLogs-个人支出经理
- ApkAnalyser-apk敏感信息提取
- springbootFastdfs
- pico-snake:用于Raspberry Pi Pico的MicroPython中的Snake游戏
- 实验8 PWM输出实验(ok)_pwm_stm32_LED_
- loopback连接oracle数据的步骤总结
- BLoC-Shopping:使用“业务逻辑组件”设计模式和集团状态管理的应用
- 网站源代码前端交互 移动端转换
- Chart:基于 Highcharts.js 的图表生成器
- 人体测量学
- next-crud:使用NextJS构建的全栈CRUD应用程序
- Matrosdms:具有现实生活对象的文件管理系统-开源
- CPP程序设计实践教程_Cprogram_
