火星精确着陆:动力下降阶段创新导航方案与性能评估
39 浏览量
更新于2024-08-26
收藏 1.56MB PDF 举报
"火星精确着陆的动力下降阶段的创新导航方案"
火星精确着陆是未来火星探索任务中的关键技术,尤其当目标着陆精度要求在100米以内时。动力下降阶段是整个着陆过程中最复杂的部分,因为它涉及到对航天器速度、高度和位置的精确控制。这篇论文主要关注这个阶段的导航性能提升,并提出了一种创新的导航方案。
该创新方案建立在惯性测量单元(IMU)的基础之上,IMU通过计算加速度和角速度来实现航位推算。然而,单独依赖IMU可能产生累积误差,因此引入了集成多普勒雷达(IDR)的测量数据,用于校正车辆的下降速度和高度。IDR能够实时提供精确的速度信息,有助于减少由风速、地形起伏等因素引起的不确定性。
此外,车辆与火星轨道器之间的距离和视线相对速度通过无线电传感器进行测量,并整合到一个扩展卡尔曼滤波器(EKF)中。EKF是一种优化的估计方法,它能融合不同来源的测量数据,以提供车辆的水平位置校正。火星轨道器的位置对导航方案的性能有显著影响,因此进行了随机分析,以确定最佳的轨道器相对位置。
论文还探讨了两种不同的观测方案:一种结合了IDR的测量和无线电距离测量,另一种则进一步考虑了无线电速度测量。这增加了导航系统的鲁棒性,并且通过对比实验,证明了这些改进对于提高导航性能的重要性。
最终,通过随机模拟评估了创新导航方案的性能。结果表明,与仅使用IDR的导航方案相比,新方案在精确着陆过程中能提供更优的定位精度,从而降低了任务风险,增强了任务的成功率。
这篇论文提出的创新导航方案为火星精确着陆提供了有力的技术支持,通过集成多种传感器和高级滤波算法,有望在未来的火星探索任务中实现更安全、更精准的着陆。
_
r ¼ v
_
v ¼ a
c
þ g 2x
l
m
v
_
q ¼
1
2
XðxÞq
ð1Þ
where r and v are vehicle position and velocity vectors, q is
the vehicle attitude quaternion vector with respect to the
target-fixed reference system, x is the vehicle angular speed
with respect to the target-fixed reference system expressed
in the body-fixed reference system, x
l
m
is Mars rotation
angular speed expressed in the target-fixed reference sys-
tem, a
c
is the control acceleration generated by the descent
engines, g is the local gravity vector which is assumed to be
a constant vector, and X(x) is the quaternion matrix given
by
XðxÞ¼
0 x
x
x
y
x
z
x
x
0 x
z
x
y
x
y
x
z
0 x
x
x
z
x
y
x
x
0
2
6
6
6
4
3
7
7
7
5
ð2Þ
Since the Coriolis acceleration caused by the Mars rota-
tion is much smaller than the control and the gravitational
acceleration, it can be omitted in the dynamics. Therefore,
Eq. (1) can be simplified as
_
r ¼ v
_
v ¼ a
c
þ g
_
q ¼
1
2
XðxÞq
ð3Þ
2.2. Sensor models
Three types of navigation sensors are included in the
proposed navigation scheme. IMU is the basic sensor used
for dead reckoning. IDR measures vehicle beam-direction
distance to the ground which contains vehicle altitude
information and the line-of-sight velocity which contains
vehicle velocity information. Thus, the aim of involving
IDR is to correct the recursive altitude and velocity. The
radio senso r measures the distance between the vehicle
and the MO as well as their line-of-sight relative velocity
to correct the horizontal position.
2.2.1. Inertial Measurement Unit
The IMU is composed of an accelerometer and a gyro-
scope. Even the most advanced IMU suffers from misalign-
ment, bias, and integration drift (Busnardo et al., 2011).
Here, the accelerometer and gyroscope are both considered
to be corrupted by a drift-rate bias and drift-rate noise.
Thus, the output of IMU is given by
a
o
¼ a
r
þ b
a
þ g
a
x
o
¼ x
r
þ b
g
þ g
g
ð4Þ
where a
r
and w
r
are the true acceleration and angular rate,
b
a
and b
g
are the drift-rate biases of the accelerometer and
gyroscope, g
a
and g
g
are the drift-r ate noises assumed to be
Gaussian white noise. The drif t-rate bias is not a constant
but an integration of a Gaussian white noise, shown in Eq.
(5)
db
a
dt
¼ n
a
db
g
dt
¼ n
g
ð5Þ
The IMU data is not treated as observation but used for
dead reckoning. Hence the IMU noise is not considered as
observation noise but state noise.
2.2.2. Integrated Doppler Rada r
To determine the vehicle altitude and Car tesian velocity
in the targe t-fixed reference system, the IDR should carry
at least three beams in different directions (Amzajerdian
et al., 2012). In this paper, a six-beam IDR, similar to the
MSL Terminal Descent Sensor, is considered. This sensor
contains six antennas each with a unique beam direction.
Distribution of six beams is shown in Fig. 2, with one beam
pointed along the vehicle vertical axis (nadir), three beams
inclined a degrees from the vertical axis and evenly distrib-
uted in azimuth, and two beams inclined b degrees from
the nadir axis, each rotated c de grees from the vehicle for-
ward axis in azimu th (Pollard and Chen, 2009).
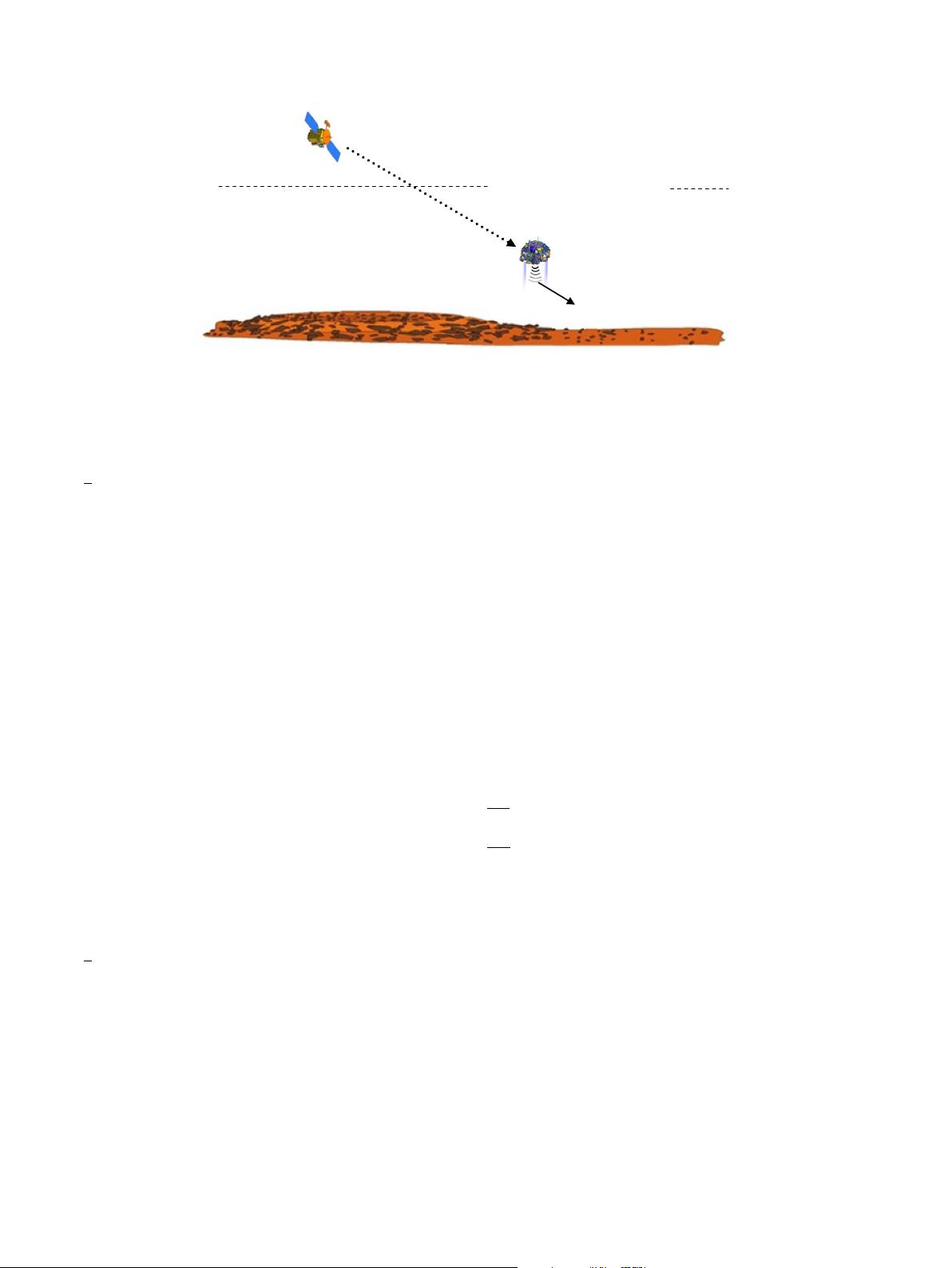
IDR beams
MO
descent stage
radio signal
Mars atmospheric interface
Fig. 1. Schematic diagram of TDS/MO navigation.
1890 T. Qin et al. / Advances in Space Research 54 (2014) 1888–1900
剩余12页未读,继续阅读
132 浏览量
1259 浏览量
106 浏览量
2021-09-15 上传
2021-05-19 上传
2024-07-25 上传
303 浏览量
128 浏览量
223 浏览量

weixin_38595690
- 粉丝: 6
- 资源: 942
 我的内容管理
展开
我的内容管理
展开







最新资源
- c2k:将cron表达式翻译成韩语
- 知识::light_bulb:记录一切
- 基于STM32的风力摆控制系统.zip
- gobed:Gobed是具有更多功能的“睡眠”替代品
- 坎纳萨皮
- 绩效管理:如何落到实处
- multiDB:NodeJS + Docker
- ndp4:Udacity 前端 Web 开发人员纳米学位项目 4 - 网站优化
- contentful-ui-extensions:我们在Last Rev中使用的有用的UI扩展,用于客户项目
- 生产管理部车间主任岗位说明书
- 电动汽车用电机控制器 的功能安全,电动汽车电机控制器的作用,C,C++源码.zip
- 采购服务器
- College-Management-Portal-layout:高校管理门户
- StopTimer:目前可在Google Play上获取Android应用程序的完整源代码-Android application source code
- 从站到PS
- Day-9:第九天的家庭作业
