车载GPS-DGPS组合导航系统自适应融合算法研究
需积分: 5 144 浏览量
更新于2024-08-08
收藏 323KB PDF 举报
“车载GPS-DR组合导航系统的数据融合算法 (2003年) - 国家重点科技攻关计划资助项目(9613020502) - 北京航空航天大学电子工程系 - 寇艳红、张其善、李先亮”
本文详细探讨了车载GPS-DR(全球定位系统-航位推算)组合导航系统中的数据融合算法,旨在提高定位精度和可靠性。作者寇艳红等人建立了一个自适应联合Kalman滤波的数学模型,该模型结合了多种先进技术,包括子系统状态评估、自适应信息分配、误差补偿、迭代扩展Kalman滤波、抗野值干扰以及U-D协方差分解滤波。
首先,文章指出车载GPS-DR组合导航系统利用GPS的全球定位能力和DR的连续运动轨迹推算,以互补两者的优点。为了优化数据融合,他们提出了一个基于联合Kalman滤波的框架,通过智能控制模块评估导航传感器子系统的工作状态,进而实现滤波器的重构和自适应调整。
接着,论文深入研究了如何运用各种技术提升融合滤波算法的性能。子系统状态评估用于监测传感器的健康状况,故障检测和隔离则可以识别并处理异常数据。自适应信息分配允许根据各个传感器的性能动态调整信息权重。误差补偿技术有助于修正导航数据中的偏差。迭代扩展Kalman滤波则能逐步优化估计过程,而抗野值干扰技术则能防止异常数据对滤波结果的影响。U-D协方差分解滤波是另一种提高滤波稳定性的手段,它通过分解协方差矩阵来降低滤波发散的风险。
面对观测噪声统计特性不确定可能导致的滤波发散问题,研究者引入了一种在线估计观测噪声特性的自适应滤波方法。这种方法能在运行过程中实时更新噪声模型,确保滤波过程的稳定性。
通过理论分析和半物理仿真实验,作者验证了所设计算法在精度、可靠性、适应性和实时性方面的优越性能。这一研究对于车载GPS-DR组合导航系统的优化设计具有重要的指导意义,为陆地车辆导航系统的精确和稳定提供了理论支持。
关键词:卡尔曼滤波、自适应滤波、组合导航、数据融合、航位推算法、GPS
中图分类号:TN967.2;U491.512
文献标识码:A
文章编号:1001-5965(2003)03-0264-05
收稿日期
基金项目 国家重点科技攻关计划资助项目
作者简介 寇艳红 女 河南许昌人 讲师 北京
车 载 GPSDR 组 合 导 航 系 统 的 数 据 融 合 算 法
寇艳红 张其善 李先亮
北京航空航天大学 电子工程系
摘 要 建立了车载 GPSDR全球定位系统航位推算组合导航系统自适
应联合 Kalman 滤波的数学模型 研究了综合运用子系统状态评估 自适应信息分配
误差补偿 迭代扩展 Kalman 滤波 抗野值干扰 UD 协方差分解滤波等技术来提高精
度和可靠性的融合滤波算法 针对滤波发散的问题 引入了一种在线估计观测噪声统
计特性的自适应滤波方法 理论分析和半物理仿真结果表明 所设计的算法在精度
可靠性 适应性 实时性等方面效果都很好
关 键 词 卡尔曼滤波 自适应滤波 组合导航 数据融合 航位推算法
GPS
中图分类号 TN U
文献标识码 A 文 章 编 号
1 问题的提出
在陆地车辆导航系统中广泛采用 GPSDR全
球定位系统航位推算组合导航技术来提高定位
的精度和可靠性 开发一种尽可能好地将两种导
航传感器数据融合起来的算法以获得最优的组合
导航结果 成为车载 GPSDR 组合导航系统设计
的一个核心问题
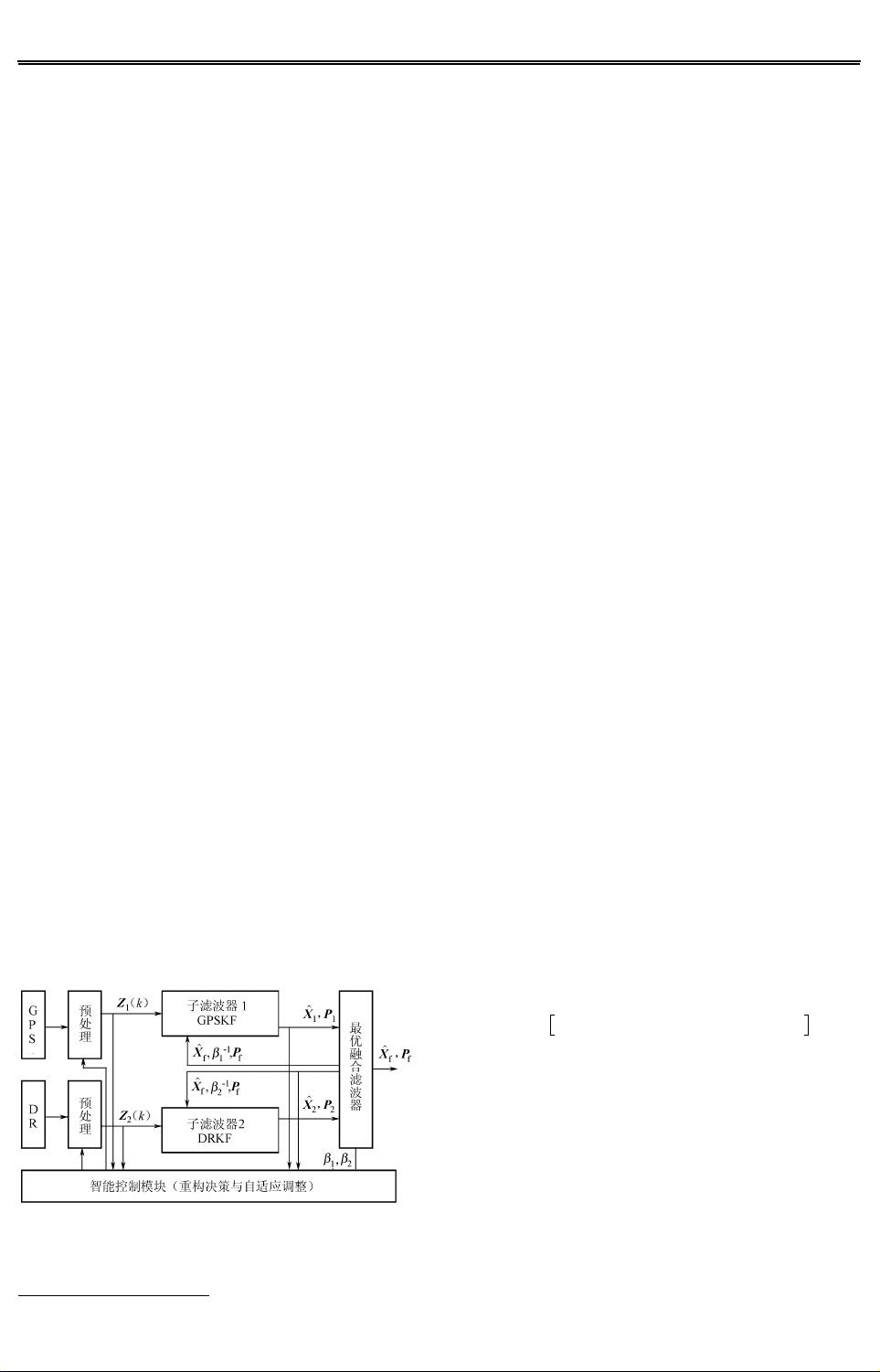
文献基于联合 Kalman 滤
波思想设计了一种实现导航信息最优融合和可容
错的数据融合滤波器结构方案 如图 示 该方案
采用智能控制模块通过模糊推理的方法对导航传
感器子系统工作状态进行评估 在此基础上对滤
波器进行重构和自适应调整 从而使融合滤波器
的精度和可靠性得到提高
图 GPSDR 组合导航系统数据融合结构框图
本文进一步在研究车载 GPSDR 组合导航系
统的应用特点和误差模型的基础上建立起系统的
数学模型 并研究综合运用子系统状态评估 故障
检测隔离与系统重构 自适应信息分配 误差补
偿 迭代扩展 Kalman 滤波 抗野值干扰 UD 协方
差分解滤波等技术来提高精度和可靠性的融合滤
波算法 针对观测噪声的统计特性不易确定从而
可能引起滤波发散的问题 将一种在线估计观测
噪声统计特性的自适应滤波方法引入该算法中
最后通过半物理仿真实验说明该算法的有效性和
实用性
2 自适应联合 Kalman 滤波模型
2 1 状态方程的建立
对于在二维平面内的运动的 GPSDR 组合导
航系统 Kalman 滤波的整体状态变量可取为
X
x
e
v
e
a
e
x
n
v
n
a
n
q
q
s
其中 x
e
x
n
分别为车辆东向和北向位置分量
v
e
v
n
分别为车辆东向和北向速度分量 a
e
a
n
分
别为车辆东向和北向加速度分量
为角速率陀
螺的随机漂移误差 q
为角速率陀螺标度因子的
相对误差 q
s
为车辆里程仪标定系数的相对误
差
对系统状态变化过程采用机动载体的当前
统计模型
并通过典型的离散化处理方法 可得
年 月
第 卷 第期
北 京 航 空 航 天 大 学 学 报
Journal of Beijing University of Aeronautics and Astronautics
March
Vol No
下载后可阅读完整内容,剩余4页未读,立即下载
2019-08-19 上传
2021-09-08 上传
2020-12-08 上传
2009-11-30 上传
2012-03-28 上传

weixin_38582909
- 粉丝: 5
- 资源: 974
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
