系统中抖动的理解与分析
需积分: 14 196 浏览量
更新于2024-07-10
1
收藏 1.75MB PDF 举报
"理解系统中的抖动——PCI SIG PPT"
在深入探讨PCI-E技术的抖动问题时,首先需要理解抖动(Jitter)的基本概念。"Understanding Jitter in System"是一个由PCI特殊兴趣小组(PCI-SIG)的演讲主题,主要由FuturePlus Systems Corporation的副总裁Barbara P. Aichinger进行讲解。该演讲旨在帮助开发者更好地理解抖动对系统性能的影响,并提出新的测量方法。
在介绍中,我们看到"Jitter Overview"作为演讲的第一个部分,这是对抖动的初步阐述。抖动被定义为相对于期望位置的时间偏差,简单来说,就是信号在理想时间点之外的变化。这种偏差对于高速串行架构(如PCI-E)的性能具有重大影响,因为它会缩小接收端的"眼图"(Eye Diagram),使数据获取的准确性受到压力。眼图是评估数字信号质量的重要工具,它描绘了信号在时间上的波动情况。当抖动增加时,眼图会变得更窄,这增加了误码率的可能性,从而限制了系统的性能。
接着,演讲提到了“一个提议中的新方法来测量抖动”。这可能是指更先进的分析技术或工具,用于更精确地评估系统中抖动的影响,可能是通过更复杂的数学模型或者实时监测手段。
在"Measuring Jitter with compliance patterns versus live traffic"这一环节,Aichinger可能会讨论使用合规模式(Compliance Patterns)与实际数据流量(Live Traffic)两种不同情况下测量抖动的差异。合规模式是专门为测试和验证设计的特定信号序列,而实际数据流量则反映了系统在正常运行时的情况。这两种方法的比较有助于了解抖动在真实世界应用中的表现。
此外,演讲中还提到了将抖动注入到一个活生生的系统中,比如9x4视频卡和9x1以太网卡的实验。这种方法通常用来模拟和测试系统在高抖动环境下的行为,以评估其容忍度和稳定性。
最后,结论部分可能总结了抖动对系统性能的影响,以及如何通过改进设计和使用更有效的测量方法来优化系统性能,确保在有显著抖动的情况下仍能保持稳定运行。
这个演讲涵盖了抖动的定义、重要性、测量方法以及在实际应用中的影响,对于理解和解决PCI-E等高速串行接口的抖动问题具有重要的指导价值。
Copyright © 2007, PCI-SIG, All Rights Reserved 7PCI-SIG Developers Conference
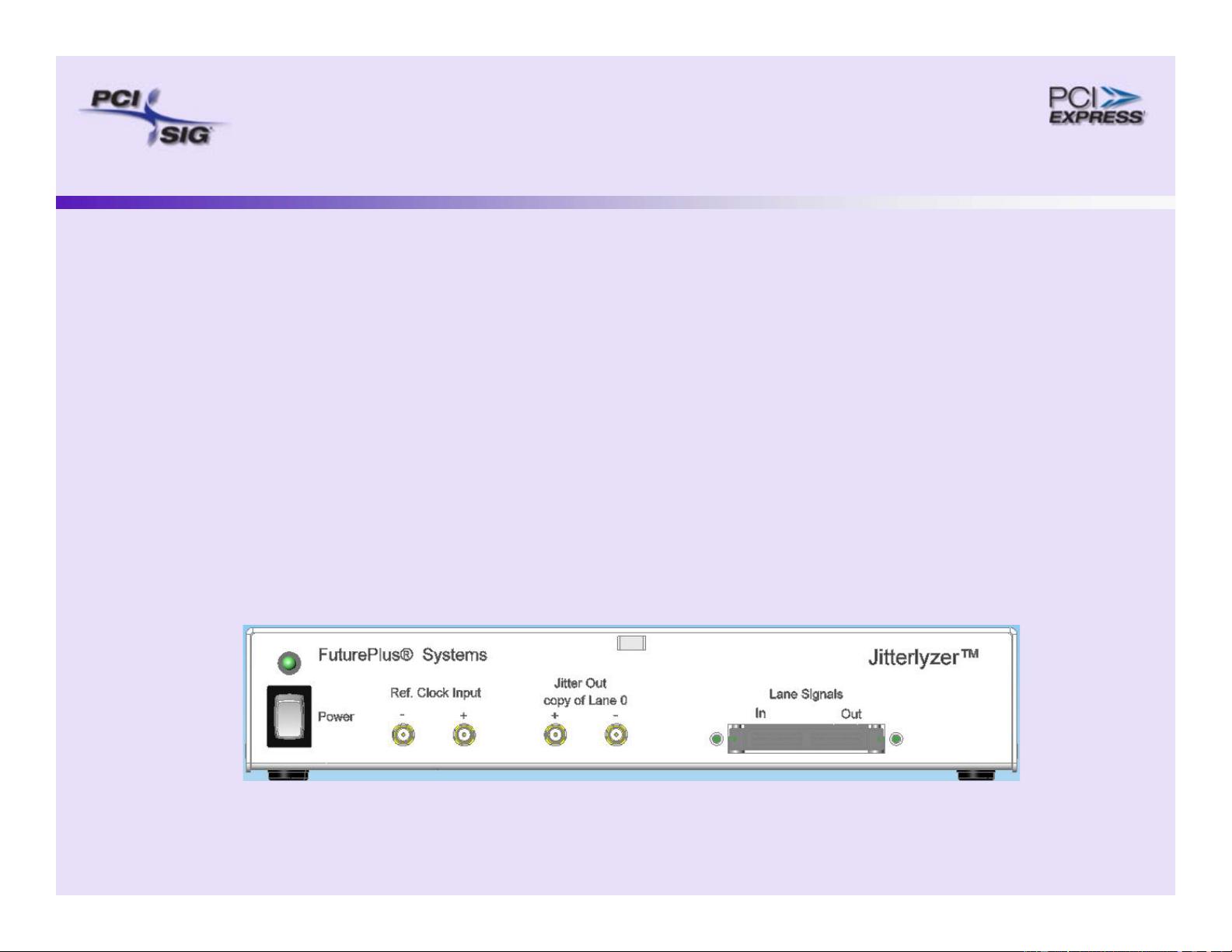
About the Jitterlyzer™
Provides the following functionality
9 BER
9 Eye Diagrams
9 Relative lane to lane skew
9 Jitter measurement and separation
9 Jitter injection on live bus traffic
9 1 to 4 channels simultaneously
剩余34页未读,继续阅读
2020-07-19 上传
2012-06-05 上传
2023-04-04 上传
2023-07-12 上传
2023-06-09 上传
2023-06-11 上传
2023-05-22 上传
2023-05-22 上传

小雨滴落落
- 粉丝: 366
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
