低成本3D激光雷达:原理与应用
需积分: 40 108 浏览量
更新于2024-07-25
收藏 4.15MB PDF 举报
3D激光扫描测距仪,或称为3D激光雷达,是一种先进的测距技术,它利用激光光束对周围环境进行三维空间的精确探测。这种设备的工作原理基于激光三角测距和线状激光截面测距。激光雷达的核心是通过激光器发射出的光束,这些光束遇到目标物后反射回来,通过测量光束的传播时间和反射角度,计算出目标物与传感器的距离。
激光三角测距是通过发射一束激光并接收其反射回的信号,根据光速和反射时间计算出目标距离。而线状激光器则能够提供连续的扫描线,使得传感器能够获取目标物体的多个侧面信息,从而构建出3D点云。点云数据是激光雷达的重要输出,它由无数个点组成,代表了环境中物体的形状和位置,对于机器人导航、3D模型重建和地图测绘等领域具有重要意义。
在机器人领域,3D激光雷达是SLAM(Simultaneous Localization And Mapping,同时定位与建图)算法的理想选择,因为它能提供精确的环境感知,帮助机器人实时定位并生成环境地图。这种高精度的定位能力使得机器人能够在复杂环境中自主导航。
市面上的单点激光测距仪价格较为亲民,但它们的测量范围有限,仅能提供单一距离信息。为了获得3D数据,可以通过两种方法提升:一是采用线状激光器,实现连续的扫描线;二是使用两个相互垂直的2D激光雷达,一个负责水平扫描,另一个负责垂直扫描,从而构建完整的3D空间图像。这种方法虽然增加了成本,但提供了更全面的空间信息。
例如,Hokuyo公司的2D激光雷达产品因其高速扫描和高精度,通常被用于工业自动化和高端机器人应用,价格不菲。然而,随着技术的发展和成本的降低,3D激光雷达正在逐步普及,成为更多应用场景的首选设备。
总结来说,3D激光扫描测距仪作为现代科技的关键组件,它的核心技术包括激光三角测距原理、线状激光扫描以及点云数据处理,为机器人、自动化和测绘等行业提供了不可或缺的高精度空间信息。随着技术的进步和成本的降低,它将在未来的科技发展中发挥越来越重要的作用。

因此,要决定我们希望实现的指标,只需要明确:
希望测距的最大距离
在最大距离下,分辨率 ( 式 (5)) 的数值
在论文 [3] 中给出了他的选取规则,这里直接给出一个结论,具体过程就不重复了:
假设对于激光光点定位能做到 0.1
0.1
0.1
0.1 个次像素单位,单位像素尺寸为 6um
6um
6um
6um 。并要求在 6m
6m
6m
6m 处
分辨率 (dq/dx)<=30mm
(dq/dx)<=30mm
(dq/dx)<=30mm
(dq/dx)<=30mm 。 则要求:
fs>=700
在我们制作过程中,这个要求还是很容易做到的。另外目前的 CMOS 摄像头往往具有更小
的单位像素尺寸 ( 在同样大小的芯片上做出了更高的分辨率 ) , 因此实际 fs 的取值下限可以
更低 。
而对于摄像头分辨率 、 激光器夹角 beta , 则决定了测距的范围 ( 最近 / 最远距离 ) 。 这里也
同样不再重复了 , 可以参考 [3] 。 对于使用 pX 进行测距的摄像头 , 其分辨率 480x640 即可
做出比较好的效果 , 更高的分辨率更好 ( 当然后文会提到缺点 ) 。 beta 一般在 83deg 左右 。
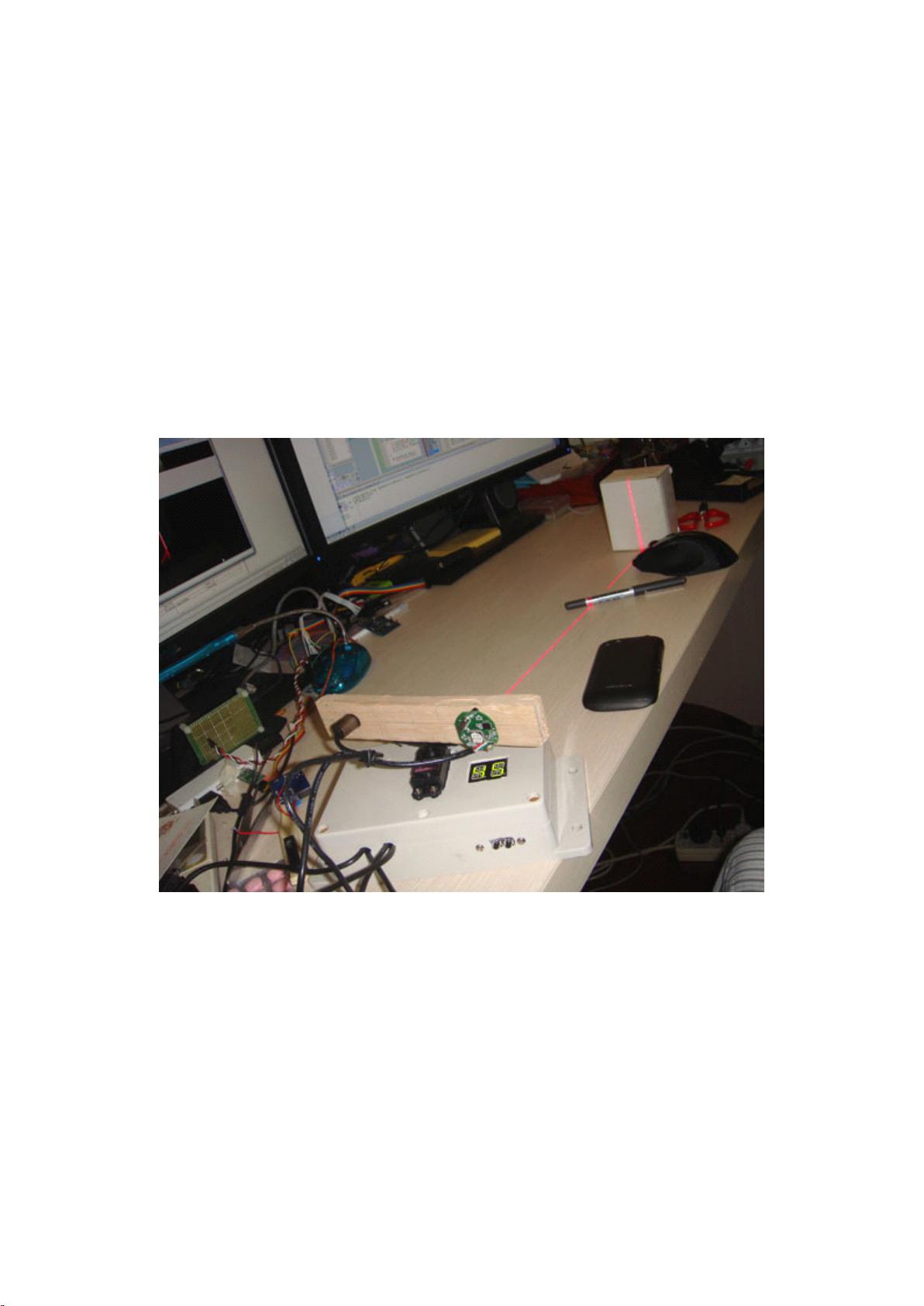
2D 激光雷达的原理和性能制约因素
在实现了单点激光测距后 , 进行 2D 激光扫描就非常容易 : 进行旋转 。 这里讨论的他的性能
问题:扫描速度。
对于采用三角测距的方式 , 从摄像头画面上识别出激光点到计算出实际距离对于目前的桌面
计算机而言 , 几乎可以认为不需要时间 。 那么 , 制约扫描速度的因素就在于摄像头的祯率了
。 对于目前市面常见的 usb 摄像头 , 其工作在 640x480 分辨率的模式下最高帧率都在 30f
ps ,那么,扫描速度就是 30samples/sec 。换言之就是每秒钟进行 30 次的测距计算。
对于一个 180 度范围的激光雷达,如果按照每 1 度进行一次测距计算,最短需要 6 秒。
如果要提高扫描速度,很自然的就是提高祯率。对于 usb 摄像头,有 PS eye 摄像头可
以做到 60fps 。但这也只能实现 3 秒 180 度扫描。需要更加高的速率,也就意味着更快的传
剩余48页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-06-08 上传
2021-04-29 上传
2021-08-15 上传
2018-11-25 上传
2020-01-26 上传
点击了解资源详情

smart_less
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
