51单片机控制的步进电机系统设计
需积分: 32 90 浏览量
更新于2024-07-26
收藏 263KB DOC 举报
"基于80C51的步进电机设计"
在本次课程设计中,学生通过使用80C51单片机实现了对步进电机的精确控制,旨在加深对51系列单片机的理解并提升实践技能。设计中,步进电机的驱动芯片选用的是ULN2803,这是一款能够提供大电流、高电压输出,并且外围电路简单的集成电路,非常适合用于驱动步进电机。
步进电机作为一种将电脉冲转换为机械位移的执行元件,其工作原理是:每当单片机发送一个脉冲信号,步进电机就会按照预设方向转动一个特定角度(即步进角),以此实现精确的位置控制。通过调整脉冲数量,可以控制电机的位移总量;通过调整脉冲频率,则可以控制电机的转速和加速度,从而实现速度调控。
步进电机主要分为永磁式、反应式和混合式三种类型。永磁式步进电机通常为两相,步进角常见于7.5度或15度,适合小扭矩应用;反应式步进电机为三相,可提供较大扭矩,但噪音和振动较大,已在发达国家逐步淘汰;混合式步进电机结合了前两者的优势,既具备较高的精度,又有较大的扭矩输出,通常有两相和五相之分,步进角分别为1.8度和0.72度,应用最为广泛。
步进电机的主要特点包括:
1. 高精度:步进电机的定位误差通常在3%-5%的步进角范围内,误差不会累积。
2. 过载性能优良:步进电机的转速不受负载变化影响,适合需要稳定速度和位置控制的场合。
3. 控制简便:由于步进电机以“步”为单位转动,与数字系统匹配良好,便于计算机控制。
4. 结构简洁:使用步进电机可以使系统的整体结构变得更简单、紧凑,减少传统机械控制的复杂性。
在实际应用中,步进电机常被用在需要精确位置控制和速度调节的设备上,如自动化设备、精密仪器、打印机等。通过80C51单片机的控制,可以实现步进电机的启动、停止、正反转以及两档速度切换,并且利用四位数码管进行状态显示,使得系统运行状态一目了然。
基于80C51单片机的步进电机控制系统不仅锻炼了学生的实践能力,也充分展示了51单片机在电机控制领域的应用潜力和灵活性。结合ULN2803驱动芯片,该系统能够满足设计要求,提供稳定可靠的步进电机控制方案。
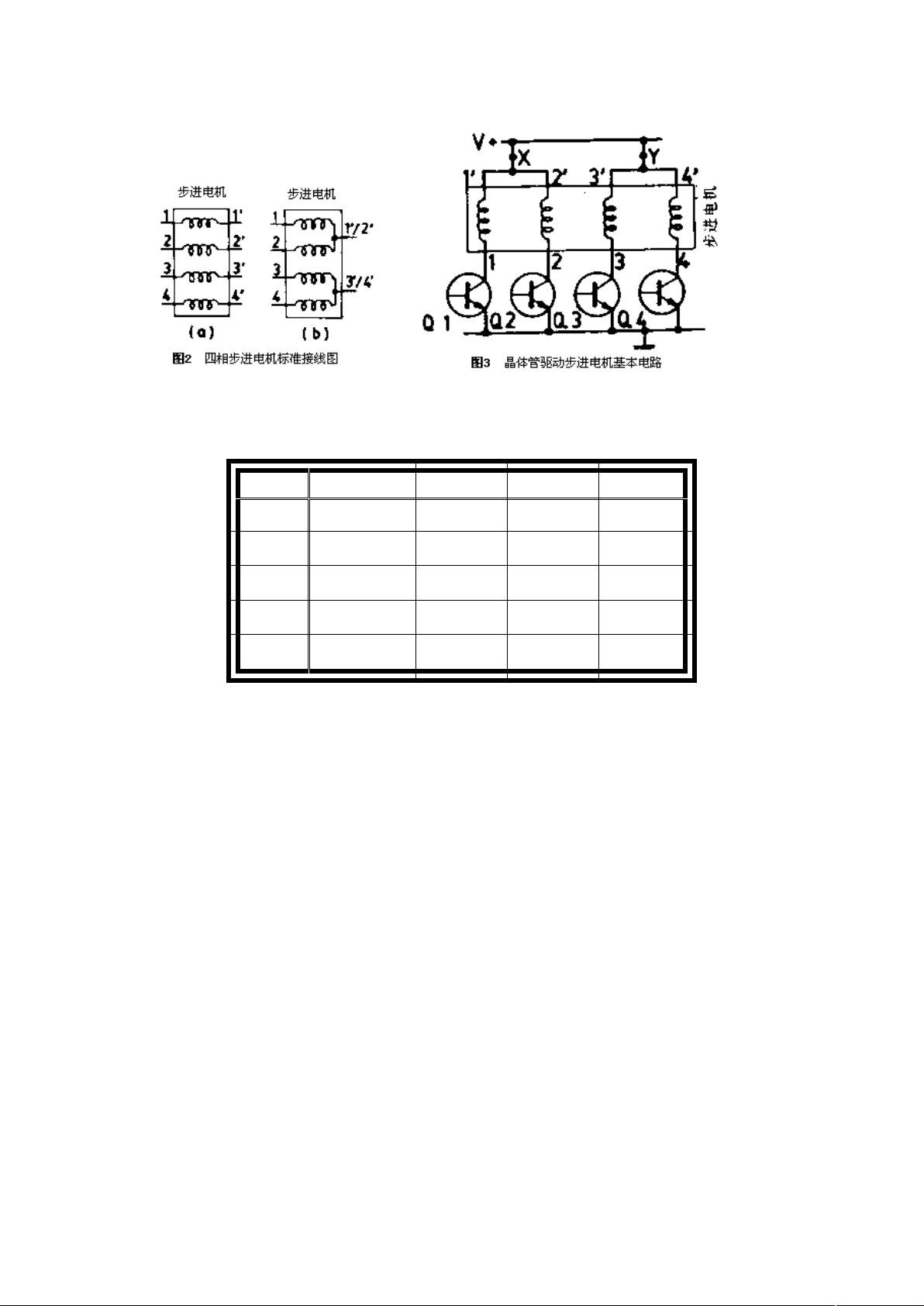
图 3 所示的电路为四相混和型步进电机晶体管驱动电路的基本方式。它的驱动电压是
固定的。表 1 列出了全部步进开关的逻辑时序。
步数
Q1 Q2 Q3 Q4
1 1 0 1 0
2 1 0 0 1
3 0 1 0 1
4 0 1 1 0
5 1 0 1 0
表 1
二 方案设计与论证
2.1 键盘设计
该系统中只运用到三个控制按钮,即 “正反”,“换挡”,“启停”,由于按钮较少,所以采
用独立键电路,这种按键电路的按键结构相对行列式按键电路更简单,更使人易懂。
2.2 显示电路设计
如图 2.31,采用 LED 数码管动态显示数据与个项参数,方法简单,容易控制,成本
低。
设计如下图
4
剩余15页未读,继续阅读
560 浏览量
116 浏览量
237 浏览量
139 浏览量
2021-10-07 上传
154 浏览量
106 浏览量

fumery
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- c++新手必看,手把手教你c++
- java课件, 包含多线程
- 数据库函数实例的小例子 有助于初学者更好的理解存储过程的操作
- Administracion Tomcat
- 易学c++初学者的好帮手
- java课件,入门者可以来参考一下
- OpenCms7教程(3)
- Patterns of Enterprise Application Architecture
- Architectural Blueprints—The “4+1” View英文
- OpenCms7教程(2).pdf
- 《计算机网络》课后习题答案
- Applying Domain Driven Design and Patterns
- A quick guide to CISSP certification
- 高质量C++C 编程指南.
- icc编译器中文使用说明
- JSP高级编程,详细介绍JSP的开发知识
