特斯拉Autopilot:数据闭环与感知算法的革新
版权申诉
本文主要探讨了特斯拉Autopilot在自动驾驶操作系统中的感知技术发展和实践,特别是从数据闭环、大规模车队运营和Dojo训练平台的角度。作者李星宇在2020年11月分析了特斯拉如何通过以下几个关键要素推动自动驾驶技术的进步:
1. **数据闭环**:特斯拉构建了一个庞大的数据闭环,其Autopilot系统的累计行驶里程已达到惊人的33亿英里,这使得特斯拉能够收集到海量的驾驶数据,用于模型训练和优化。相比之下,Waymo的测试里程远不及特斯拉。
2. **Dojo项目**:特斯拉Dojo训练平台的目标是利用无标注的视频数据(非图像)进行大规模的自监督学习,以降低成本并显著提升感知算法和规划决策性能。这个高性能计算机旨在通过百万辆车辆的数据,实现自动驾驶系统的自我进化。
3. **Autopilot系统升级**:新的AutoPilot系统在底层软件上进行了重构,支持4D数据,从L2级别进化到L4级别,实现了从训练到推理的全流程自主研发。
4. **软件开发方法变革**:特斯拉倡导从软件开发1.0的逻辑驱动模块化编程向软件开发2.0的数据驱动转变,利用机器学习解决问题,提高了迭代效率。
5. **硬件与计算平台**:特斯拉通过自主研发的芯片和中央计算平台,如车载超级计算机,不断推进软件定义汽车的理念。从EyeQ系列到自家的FSD芯片,特斯拉展示了智能化演进策略,包括AI芯片算力的超配、操作系统迭代、规模优势和应用生态的构建。
6. **技术积累与差异化优势**:特斯拉在过去的几代产品中积累了深厚的自动驾驶算法和软件经验,并通过按需定制的策略,形成了自己的竞争优势。
7. **未来展望**:文章最后提到了TBD(To Be Defined),暗示了特斯拉可能在未来继续引领自动驾驶技术的发展,但具体结论并未给出。
本文深入剖析了特斯拉在自动驾驶领域的重要举措,展示了其如何通过数据驱动、硬件升级和持续优化来推动感知技术的创新和发展。
AI ON HORIZON AI ON HORIZON
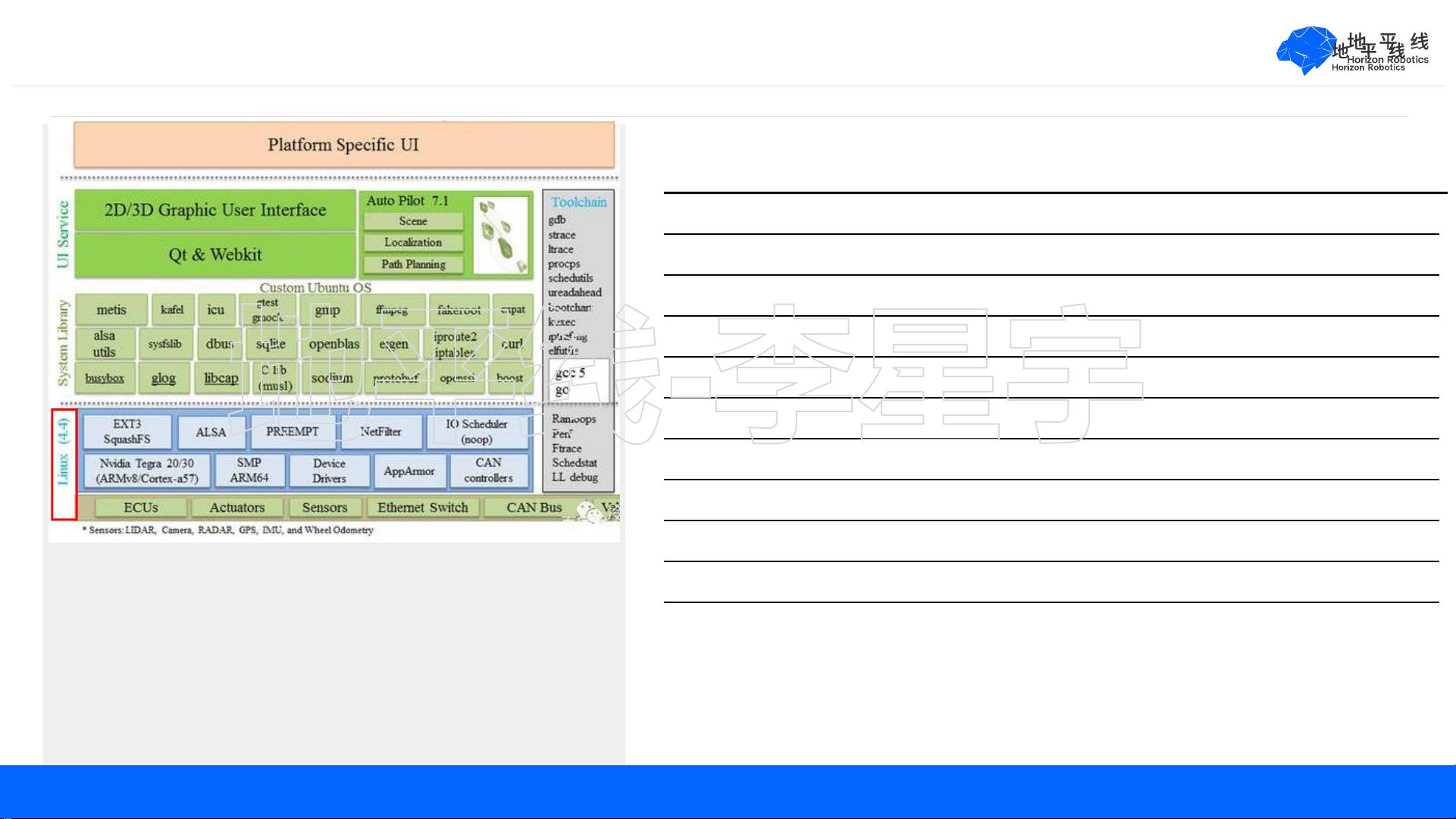
特斯拉自动驾驶操作系统:AutoPilot软件架构基于开源系统打造
• 自有车载OS:基于Ubuntu进行裁剪,Linux内核进行
实时优化,遵循GPL协议进行公开,busybox定制文
件系统coreutils
• DL框架:基于PyTorch
• 实时数据处理平台:基于开源流处理平台Kafka
bootstrap
push-core
mysql
simple-web-server
ruby-smpp
pushr-apns
Gvt
artifactory-resource
rack-attack
doorkeeper
marisa-trie
rpush
push-gcm
redis-rb
Valhala
dr-elephant
quickbase
sideiq
pushr-gcm
schema-registry
push-apns
devise_ldap_autenticatable
http-signature-ruby
Jsonql
Go
redis-slave-read
rocket-pants
Avro
Puma
Ksql
puma-metrics
pushr-core
Lmms
Coreboot
qt
rules_scala
Buildroot
rules_avro
ansible_puller
kafka_-helmsman
软件开发理念:充分利用开源系统、全栈开发
• 技术栈:Frontend/C++/Linux/Computer Graphics/QT
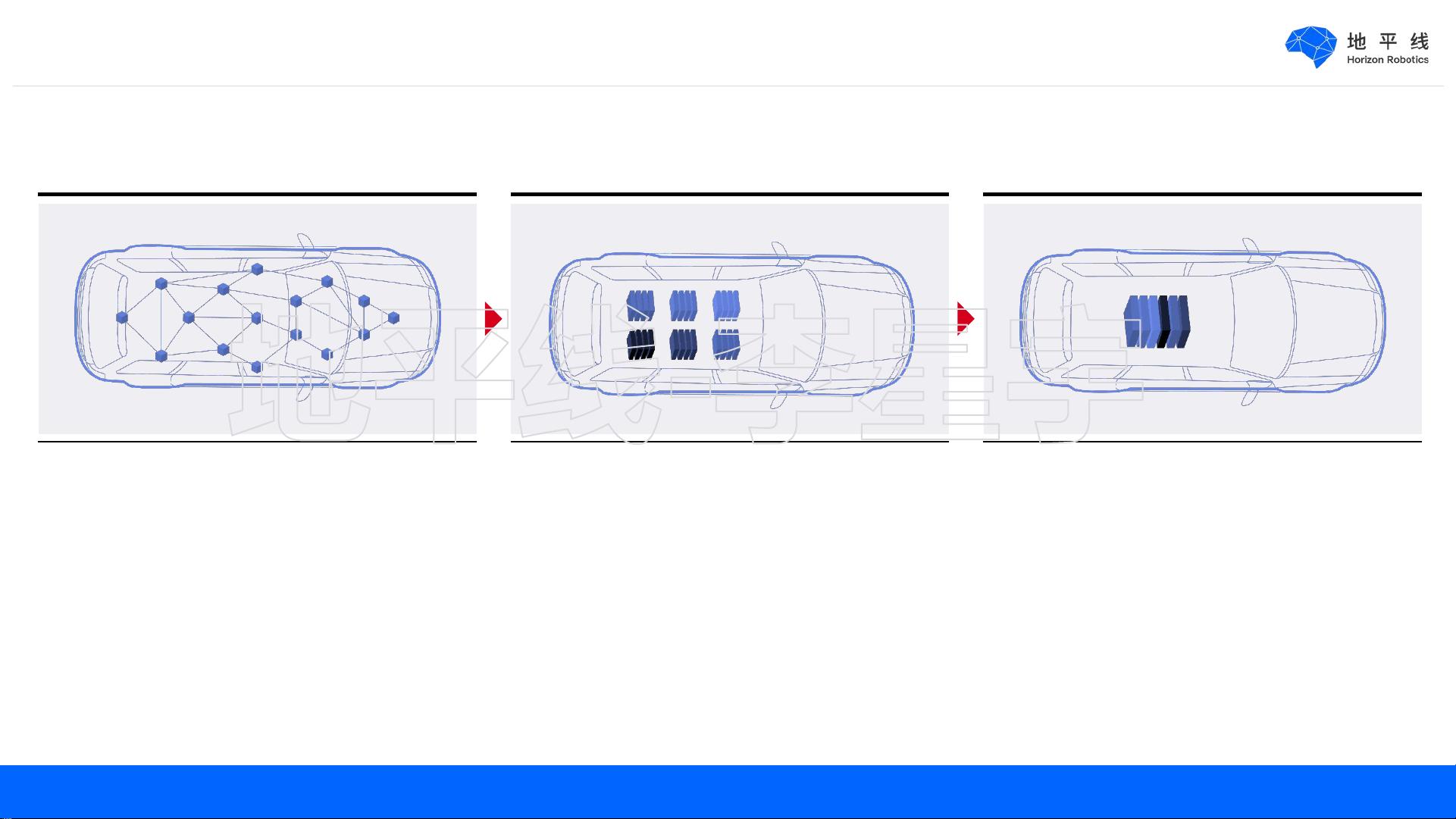
• 整车电子电气架构的革新是与操作系统级底层软件的能力相伴而生的,没有
超强的软件能力,很难推进电子电气架构的变革
剩余32页未读,继续阅读
2019-11-06 上传
2020-03-15 上传
2021-10-02 上传
2021-09-20 上传
2021-06-28 上传
2021-09-20 上传
点击了解资源详情
2020-07-03 上传

电动汽车控制与安全
- 粉丝: 269
- 资源: 4186
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
