双动力船模遥控与驱动技术详解
需积分: 25 16 浏览量
更新于2025-01-05
收藏 62KB DOC 举报
"该文档主要讨论的是双动力船模的设计规划,包括遥控电路部分和驱动电路部分,涉及无线通信、A/D转换、键盘控制以及液晶显示等多个关键模块。"
在双动力船模的设计中,遥控电路是至关重要的组成部分,它确保了用户能够远程控制船模的行驶速度和方向。遥控电路规划图未给出详细内容,但提到了关键组件和功能。Rf收发模块采用了全双工的nrf905芯片,这种芯片能同时进行发送和接收,实现了遥控器与控制电路之间的通讯。通过遥控器设定的set_speed和set_angle参数可以被发送到控制电路,控制电路则根据接收到的指令执行相应的动作,并将实时的real_speed反馈回遥控器。
A/D转向控制模块依赖于滑动变阻器连接的A/D转换器,通过改变滑动变阻器的阻值来调整电压,进而得到数字化的hand_angle信息,这个值在-128至127之间变化,用于控制船模的转向。
遥控器键盘部分采用了特定的布局,包含On/off键用于初始化电路,Send键发送设定值,以及四个方向键分别用于调整速度和转向。值得注意的是,当Send键被按下时,设定好的速度和角度会被发送给驱动电路,而且自动控制模式具有优先权,能自动校正方向。此外,上下左右键组合使用可以微调两侧电机的转速,以实现更精确的直线航行。
液晶显示模块则负责显示set-angle(设定的角度)、real-speed(实际速度)和set-speed(设定速度)等关键参数,为用户提供直观的运行状态信息。
逻辑纽带关系方面,文档提到了数据buffer的设定,这是一个结构体,包含了设定的左右驱动电机速度(charset_speed0和charset_speed1)以及设定的转过角度(charset_angle)。还有实际测量的电机速度(ucharreal_speed0),但此处未提供完整的数据结构。
这份资料提供了双动力船模遥控系统的基本框架,涵盖了无线通信、信号处理、人机交互和实时反馈等多个核心环节,对于理解此类模型的构建和优化有着重要的指导意义。
一. 遥控电路部分
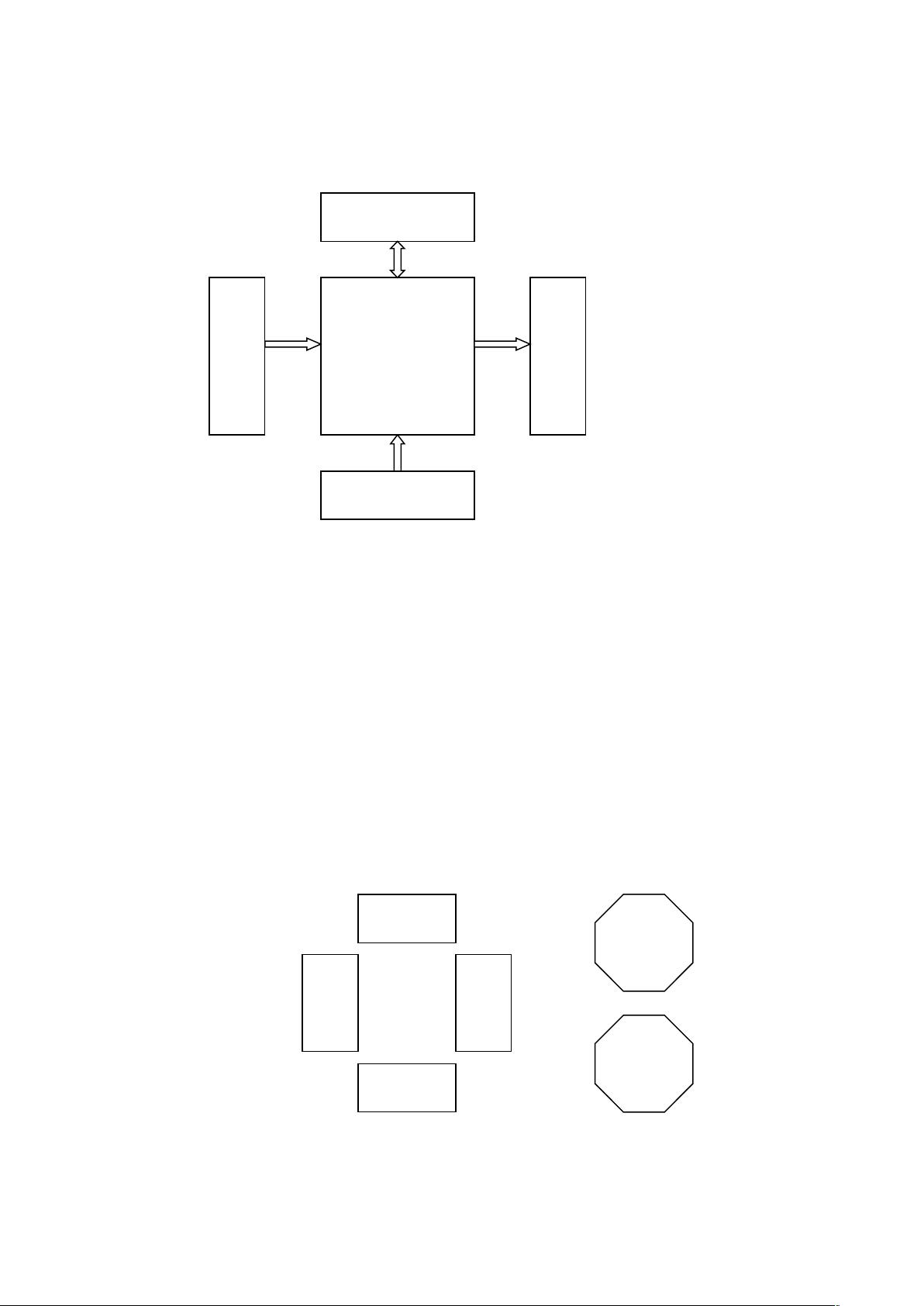
1. 遥控电路规划图:
2. 各模块说明
Rf 收发模块:
Rf 收发芯片采用全双工的 nrf905,用于遥控电路和控制电路的通讯,将遥控
器设定的 set_speed 和 set_angle 发送给控制电路执行,同时接受控制电路测得的
real_speed。因而有一个接收驱动函数 rfr()和一个发送驱动函数 rft()。
A/d 转向控制模块:
A/d 转向控制模块由接有滑动变阻器的 a/d 转换器组成。改变滑动变阻器的阻
值,电压在 0-5v 变化,输出的数字量在 0-255 变化,再减去 128 后就是我们要的
hand_angle(在-128-127 变化)了
键盘控制模块:
a. 遥控器键盘的组织:
b.键的功能:
On/off:使驱使电路初始化。初始化后船的速度变为零。
MCU
RF 收发模块
A/D
转向
控制
模块
液晶
显示
模块
键盘控制模块
Send
On/off
up
left right
down
下载后可阅读完整内容,剩余5页未读,立即下载
471 浏览量
912 浏览量
2021-12-16 上传
2023-09-25 上传

verybing
- 粉丝: 41
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- doa-tools-master.zip
- Bongard-LOGO:Bongard-LOGO是一个Python代码存储库,其目的是在无需人工干预的情况下大规模生成综合Bongard问题。
- 个人履历响应式网页模板
- allantonestudios.com:艾伦·托恩电影制片厂的公共网站。 内置RapidWeaver 8
- Fitting是一个面向大数据的统一的开发框架
- WaterDrifterAndroid
- TabPacker-crx插件
- 读写Excel.zip
- stm32单片机8盏流水灯实验
- 微信小程序Demo:盛世华安公司介绍
- python编程题练习.zip
- K-9:K-9 机器人项目的各种文件
- Trello | Custom Fields First-crx插件
- 信息安全等级保护安全建设服务机构能力评估合格证书申请指南及评估准则(试行).rar
- vue-live2d:vue live2d招牌女孩(演示
- Executive-Docs:用于执行目的的公共文档的宿主,例如会议记录,议程等
