汽车干扰力估计:自适应卡尔曼滤波与动力学模型结合
58 浏览量
更新于2024-09-05
收藏 591KB PDF 举报
"基于自适应卡尔曼滤波的汽车前后轴干扰力估计,林棻,赵又群,宋桂霞——本文研究汽车自动车道保持控制中的关键问题,即汽车侧向干扰力的估计。通过结合汽车动力学模型和自适应卡尔曼滤波理论,提出了一种新的方法来估计汽车前后轴的干扰力。该方法在建立的线性二自由度汽车动力学模型中考虑了前后轴的侧向力,利用横摆角速度、侧向加速度和方向盘转角作为量测信息,通过自适应卡尔曼滤波算法实现干扰力的最小方差估计,并对测量信号进行滤波降噪,提高估计精度。这种方法在ADAMS/CAR的虚拟试验中得到验证,为汽车侧向控制系统的估计器设计提供了理论依据。关键词涉及汽车前后轴干扰力、自适应卡尔曼滤波、动力学模型以及状态估计。"
本文的研究背景是汽车自动化驾驶技术中的一个重要挑战,即如何准确估计汽车在行驶过程中受到的侧向干扰力。由于这些干扰力直接影响到汽车的稳定性和操控性能,因此,对其进行有效估计对于实现精准的自动车道保持控制至关重要。传统的估计方法可能因干扰信息难以直接获取而存在局限性。
作者提出的解决方案是采用自适应卡尔曼滤波算法。卡尔曼滤波是一种广泛应用的状态估计方法,它结合系统模型和测量数据,实时更新系统状态估计,以最小化估计误差。然而,汽车动力学系统通常是非线性的,因此,通过线性二自由度模型简化动力学行为,将前后轴的侧向力纳入考虑,有助于构建更贴近实际的估计框架。同时,自适应卡尔曼滤波能够根据系统参数的变化自动调整滤波器的性能,提高了对未知干扰的适应能力。
在实施过程中,将横摆角速度(车辆旋转的速率)、侧向加速度(车辆横向运动的加速度)和方向盘转角作为辅助变量,这些信息可由车载传感器直接获取,作为卡尔曼滤波的输入。通过自适应算法,不仅可以估计出前后轴干扰力,还能对测量信号进行滤波,降低噪声影响,从而提高干扰力估计的精度。
在ADAMS/CAR这一专业汽车动力学仿真软件上进行的虚拟试验结果表明,所提算法在估计汽车前后轴干扰力方面表现出高精度,为实际的汽车控制系统设计提供了有效的理论支持。这表明,自适应卡尔曼滤波与汽车动力学模型的结合为解决汽车自动车道保持控制中的干扰力估计问题提供了一种切实可行的方案,有望在未来智能驾驶技术中得到广泛应用。
基于自适应卡尔曼滤波的汽车前后轴干扰力估计
林棻,赵又群,宋桂霞
(南京航空航天大学车辆工程系 南京 210016)
摘 要:针对汽车自动车道保持控制中汽车侧向干扰信息难以直接获取,提出把汽车动力学模型和自适应卡尔曼滤波理论
相结合进行汽车前后轴干扰力估计。在线性二自由度汽车动力学模型中考虑前后轴的侧向力干扰,以辅助变量横摆角速度、
侧向加速度和方向盘转角为量测信息,通过改进的自适应卡尔曼滤波算法建立了前后轴干扰力的最小方差估计,并对量测
信号进行了滤波降噪。基于 ADAMS/CAR 的虚拟试验验证了该算法具有较高的估计精度,可以为汽车侧向控制系统中估计器的
设计提供理论指导。
关键词:汽车前后轴干扰力;自适应卡尔曼滤波;动力学模型;状态估计
中图分类号:U461.6
Vehicle Axles Disturbing Forces Estimation Based on Adaptive Kalman Filter
Lin Fen
,
Zhao You-qun
,
Song Gui-xia
(Department of Automotive Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing, 210016)
Abstract: To aim at the problem that lateral disturbance on vehicle are too difficult to measure directly in automatic lane keeping,
vehicle axle disturbing forces estimation algorithm is proposed based on vehicle dynamics model and adaptive kalman filter theory.
Linear vehicle model of two degree-of-freedom is used, in which lateral forces on front and rear axle are considered. Assistant
variables of yaw rate
、
lateral acceleration and steering wheel angle are considered as measurement information. Linear minimum
variance estimation of axle disturbing forces is obtained by improved adaptive Kalman filter recursive algorithm, the measurement
signals are also denoised. The virtual experiment implemented by ADAMS/CAR indicates that the algorithm has high accuracy. It
can provide theoretic direction for design of estimator in vehicle lateral control system in lane keeping.
Key words: vehicle axles disturbing forces; adaptive Kalman filter; dynamic model; state estimation
引 言
汽车行驶过程中,驾驶员为了保持车道要投入大量的精
力和时间,也容易造成驾驶员疲劳。为了解决这方面的问题,
国外很早就开始基于车道保持的辅助驾驶系统的研究。宝马
公司在九十年代初对“航向控制系统”进行了基于实验的研
究,当汽车偏离车道时,系统通过观测器在线估计出侧向干
扰力,之后转向动作器对汽车产生一个附加转向扭矩使汽车
恢复原车道
[1]
。由此可见汽车自动车道保持控制中最基本也
是最重要的就是精确实时获取侧向干扰力,这种干扰力主要
是由侧向风或公路路面不平度等外界环境引起的,当汽车在
高速行驶时这种干扰力的持续累积效应可以使汽车转向轮
发生微小偏转而偏离预定的车道
[2]
。
汽车在行驶过程中的侧向干扰力很难直接测量,因此对
干扰力进行估计就是行之有效的途径。基于卡尔曼滤波并结
合汽车动力学的汽车状态估计研究近年来受到国内外研究
人员的广泛重视。文献[3]通过卡尔曼滤波实现了汽车横摆
角速度的线性最小均方误差估计;文献[4]利用扩展卡尔曼
滤波实现基于四自由度汽车模型的汽车操纵动力学状态估
计;文献[5]采用扩展线性化卡尔曼滤波对汽车控制系统中
基金项目:高等学校博士学科点专项科研基金项目(20040287004)
不可测信号进行了状态估计。本文设计了一种改进的
Sage-Husa自适应卡尔曼滤波算法,并将其和汽车动力学模
型相结合应用于汽车前后轴侧向干扰力估计。根据辅助量测
变量通过滤波估计算法获得前后轴干扰力的最小方差估计。
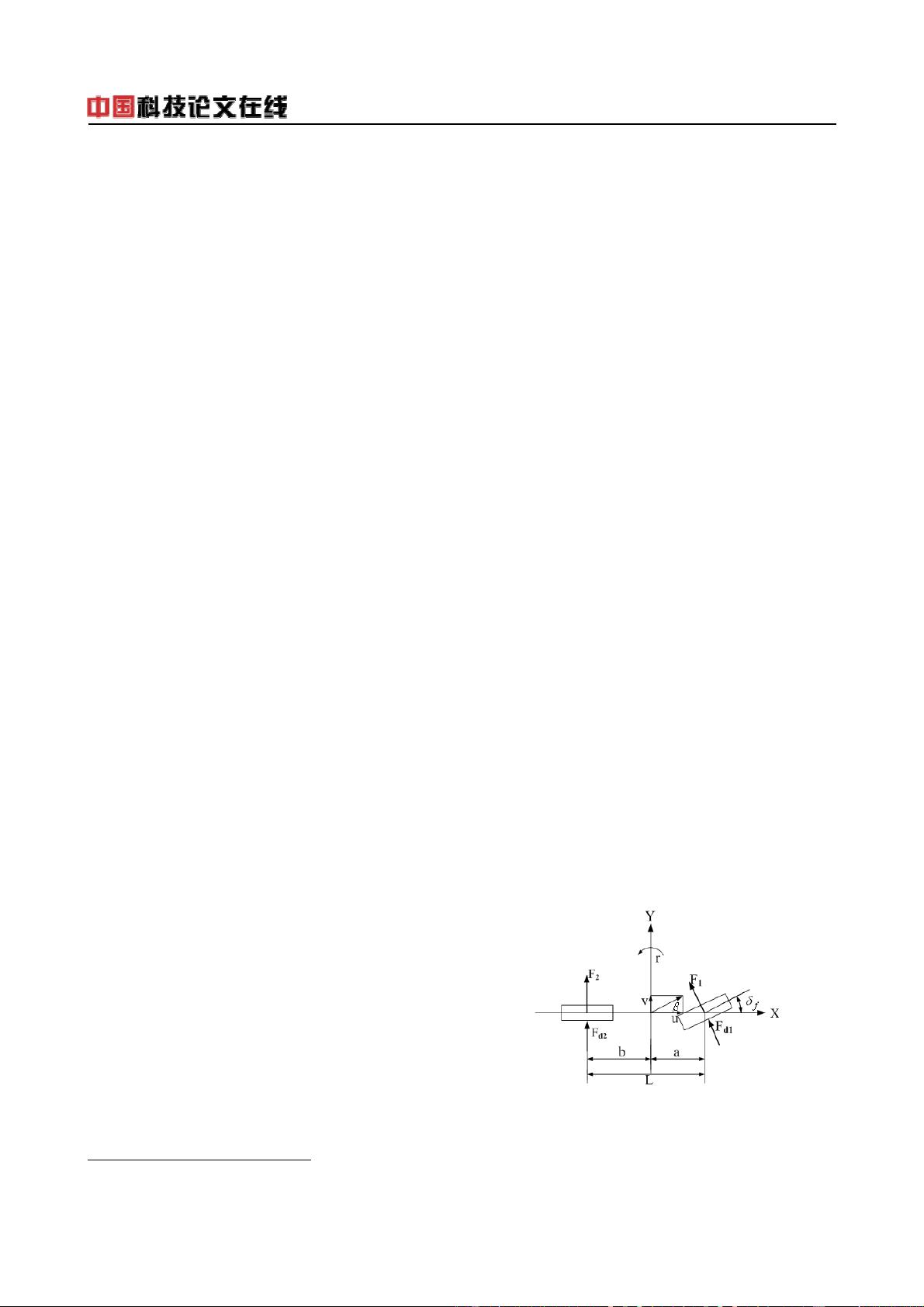
1 汽车前后轴干扰力状态估计模型
本文建立包含前后轴侧向干扰力 、 的二自
由度汽车模型,这里二自由度是指质心侧偏角和横摆角速
度,如图1所示。
1d
F
2d
F
图 1 汽车二自由度模型
由于
f
δ
很小,因此汽车的运动微分方程为:
2211
)(
dd
FFFFurvm ++
+
=
+
&
(1)
1
http://www.paper.edu.cn
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-11-09 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-11-18 上传

weixin_38724663
- 粉丝: 7
- 资源: 891
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
