使用Xilinx FPGA实现数字预失真(DPD)技术
"Xilinx DPD (Digital Predistortion) 技术文档,主要应用于消除功率放大器在传输宽频信号时产生的非线性效应。该文档以Xilinx XAPP1128(v1.0)的形式发布,适用于3G移动技术及更高级别的基站。"
在无线通信系统中,功率放大器(PA)在放大信号以增强传输功率的同时,可能会引入非线性失真。这些非线性效应,特别是在传输宽带信号时,会降低信号质量,影响通信系统的性能。为了克服这个问题,"Digital Predistortion (DPD)"技术应运而生。DPD的基本原理是在信号进入功率放大器之前,预先对信号进行逆向失真处理,从而在放大后抵消非线性失真,确保信号的纯净度。
Xilinx的文档详细介绍了如何利用其FPGA(Field-Programmable Gate Array)实现高效的DPD解决方案。FPGA因其可编程性和强大的数字信号处理能力,成为实现DPD的理想平台。文档中提供了一个完整的功能性IP内核描述,这个内核设计用于与3G及更高代际的基站系统配合工作。
测试结果是在Axis Common Digital Radio System-Xilinx edition, 2nd edition (CDRSX2)平台上进行的。这是一个硬件-软件协同设计的系统,它充分利用了Xilinx FPGA的数字信号处理特性以及嵌入式处理能力。通过在商用微波PA上执行测量,文档展示了DPD设计的有效性,证明了FPGA在实现DPD功能上的优越性。
此外,文档还可能涵盖了DPD算法的实现细节,如模型选择、参数优化、实时校准方法以及与FPGA硬件接口的设计考虑。DPD算法通常基于数学模型,如多项式或记忆多项式模型,以预测和补偿PA的非线性行为。这些模型的复杂度和精确度直接影响到DPD的性能。
这份Xilinx DPD文档为设计者提供了一套完整的解决方案,帮助他们理解和实现基于FPGA的DPD系统,以提升通信系统的整体质量和效率。对于从事无线通信和射频设计的工程师来说,这是一份极具价值的参考资料。
DPD Algorithm and Architecture Design
XAPP1128 (v1.0) March 18, 2009 www.xilinx.com 16
R
— XILINX CONFIDENTIAL — XILINX CONFIDENTIAL — XILINX CONFIDENTIAL
—
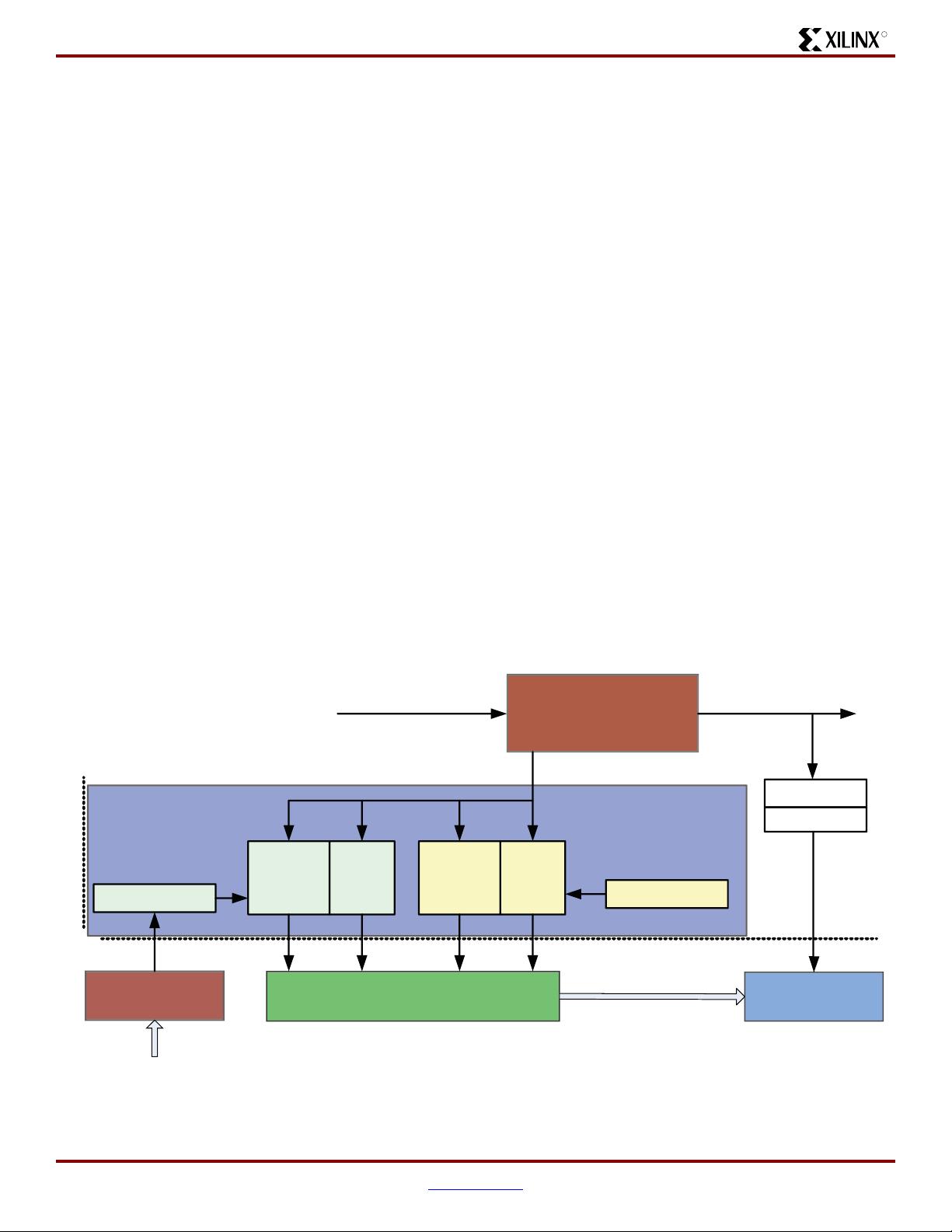
The MicroBlaze processor system is configured with 64 kB of internal block RAM memory and
the 32 kB Capture RAM is also reused as working memory after a capture has been
completed. Software has been developed for this platform, which has been comprehensively
tested (see “Performance Testing”). A user interface is provided that allows individual
operational requirements relating to control and monitoring to be met. Details of how to use the
platform and the supplied software is given in “Using the Supplied Software” and “System
Integration.”
At the highest level, the software consists of the following elements:
• Estimation Core Function (ECF) - aligns the transmit and receive data in amplitude, delay,
and phase, and then performs the least-squares estimation. Further details are given in
“Capture Buffers and Estimation Core Function (ECF).”
• Quadrature Modulator Correction (QMC) - aligns the transmit and receive data in
amplitude, delay, and phase, and then computes the Quadrature Modulator errors. Further
details are given in “Quadrature Modulator Correction Algorithm Overview”
• Sample Capture Acceptance (SCA) - uses average power and amplitude histogram
measurement of the capture versus the average signal to ensure that the capture
produces accurate estimation. Further details are given in “Measurements Block and
Sample Capture Acceptance (SCA).”
• Power Amplifier Over-Drive Detection (ODD) - creates a predictive soft metric from the
coefficients computed during ECF indicating when the peaks of the transmitted waveform
are entering the saturation region of the power amplifier. Further details are given in “Over-
Drive Detection Algorithm Overview”.
• Dynamic Control Layer (DCL) – monitors average transmitted power and learns and
applies the coefficients in a manner relevant to the predistortion characteristics of the PA.
Further details are provided in “Dynamic Control Layer (DCL).” The DCL routine can
optionally update the QMC coefficients in a minimally intrusive manner.
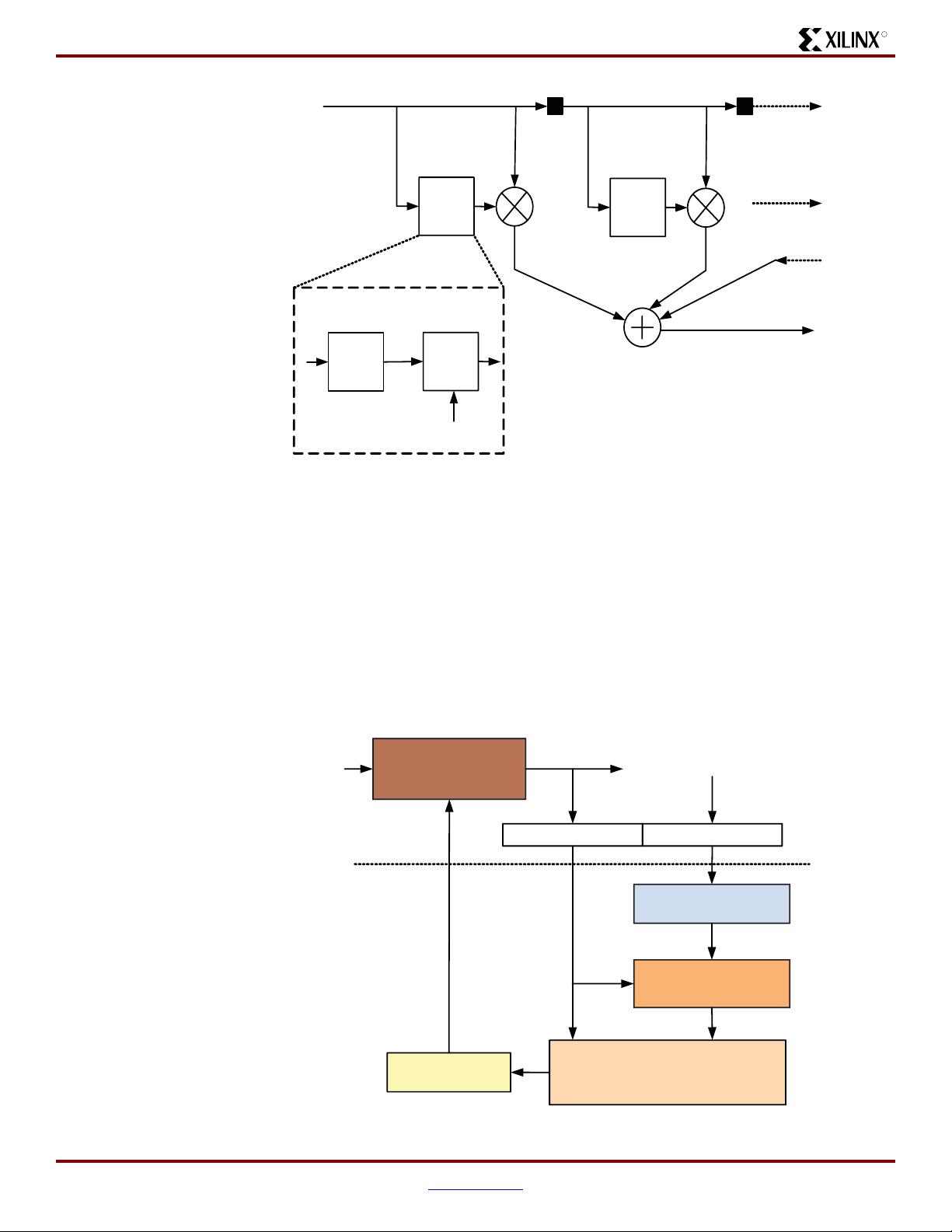
Predistorter
The structure implied by Equation 1 is shown in Figure 8, where P
0
, P
1
, … are polynomials of
the signal magnitude. It would be very costly in hardware to implement these polynomials
directly. Instead, look-up tables containing 256 complex samples of the polynomials are used.
These are addressed by the complex amplitude of the signal, as indicated by the break-out box
in Figure 8.Testing has shown that this is an adequate number of samples. Further details are
provided in “Sample Rate Datapath.”
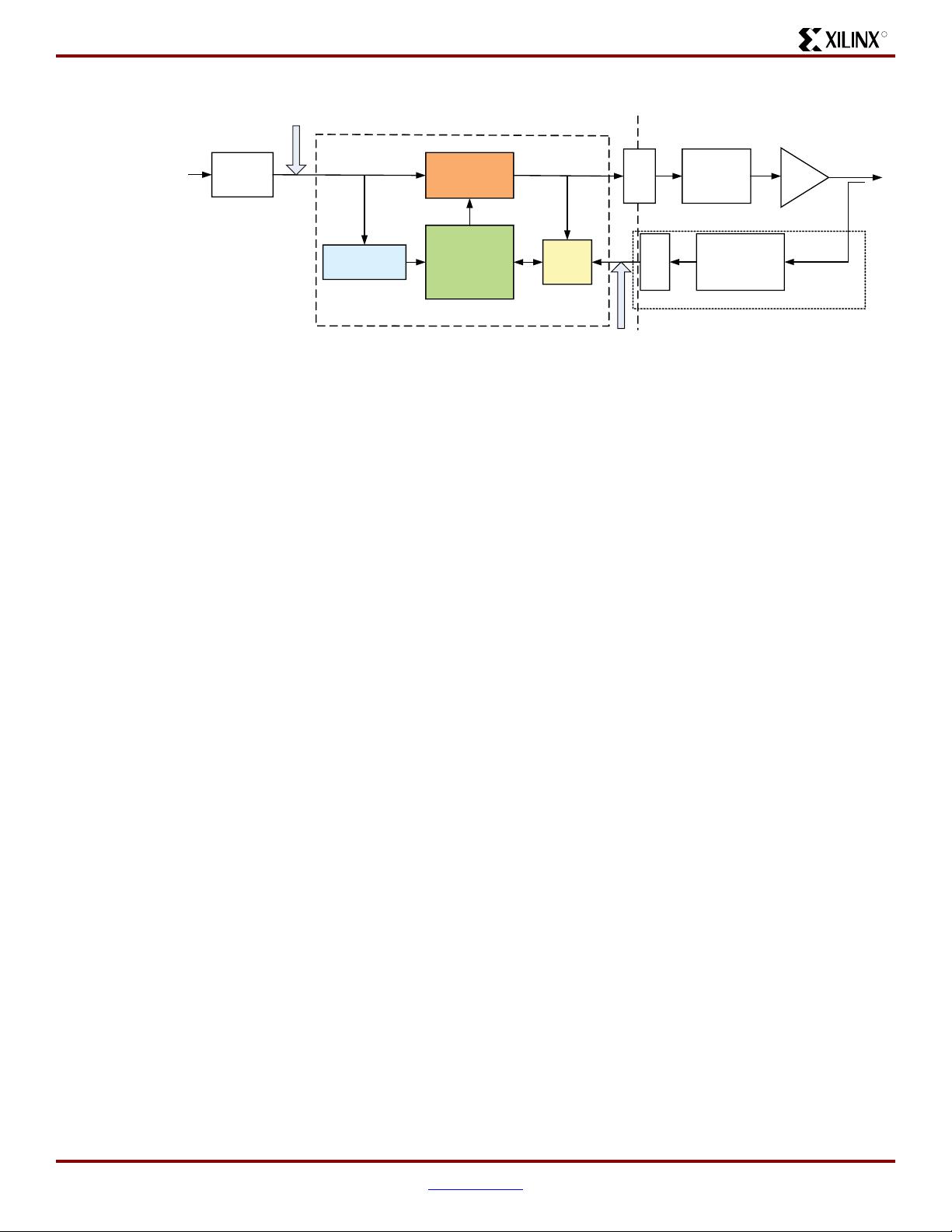
X-Ref Target - Figure 7
Figure 7: Xilinx DPD Architecture
PA
IQ
Data
RF
Upconverter
RF
Downconverter
DAC
ADC
DUC-CFR
Parameter
Estimator
(MicroBlaze +
RAM)
Capture
Buffer
Measurements
Digital Predistortion Solution
Digital Analog
Observation
Path
Predistortion
Predistortion Sample
Rate
2x Sample Rate
x1044_07_122007

剩余157页未读,继续阅读
2020-01-31 上传
2018-11-07 上传
2019-12-26 上传
2022-03-03 上传
点击了解资源详情
点击了解资源详情
2023-08-02 上传

duoerpu
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
