自适应阵列天线系统与干扰抑制
需积分: 9 40 浏览量
更新于2024-07-29
1
收藏 1.48MB PDF 举报
"这篇论文是关于自适应阵列天线系统的,由B.Widrow、M.ManteY、L.J.Griffiths和B.B.Goode等作者在1967年的IEEE Proceedings上发表,是该领域的经典之作。文中探讨了一种结合天线阵列与自适应处理器的系统,该系统能同时在空间域和频率域进行滤波,降低信号接收系统对干扰源的敏感性。通过最小子均方误差(LMS)算法自动调整信号处理器的可变权重,以模拟来自特定方向的‘期望’信号。在训练过程中,天线阵列能够‘定向’,使其方向性图案具有先前指定的主要波束,同时形成对非期望方向噪声的零点,以抑制不同传播方向的干扰。"
自适应阵列天线系统是无线通信中的一种关键技术,其核心在于利用多个天线元素的组合来实现更精细的信号处理和干扰抑制。在本文中,作者介绍了一个由天线阵列和自适应处理器组成的系统,该系统可以动态调整其响应,以优化信号接收性能。系统通过在空间域和频率域执行滤波操作,能够有效降低由于干扰源导致的灵敏度降低问题。
LMS(Least-Mean-Squares)算法在自适应滤波器中扮演了关键角色。这是一种在线学习算法,能够在不断接收信号的过程中实时更新滤波器权重,以最小化误差平方和。在这个过程中,注入的导频信号模拟了来自期望方向的信号,使得天线阵列能够根据这个信号进行训练,形成指向该特定方向的主要波束。
同时,该系统能够形成对其他方向的零点,也就是在天线方向图中创建一个低增益区域,以抑制非期望方向的噪声或干扰。这种能力对于提高信噪比和增强通信系统的抗干扰性能至关重要。自适应阵列天线技术广泛应用于雷达、卫星通信、移动通信等领域,特别是在需要高精度定位和强干扰环境下,其优势尤为突出。
这篇论文深入探讨了自适应阵列天线系统的设计原理和实现方法,为后来的无线通信技术发展奠定了理论基础。尽管发表于上世纪60年代,但其理论和技术至今仍然对现代通信系统设计具有重要指导意义。
2146
PROCEEDINGS
OF
THE
IEEE,
DECEMBER
1967
With respect to the midpoint between the antenna ele-
ments, the relative time delays of the noise at the two an-
tenna elements are
f
[
1/(4fo)] sin
46
=
-t
1/(8fo)
=
&
&/(8~),
which corresponds to phase shifts of
-t
a/4 at frequency&.
The array output due to the incident noise at
0
=
a/6
is then
N
[wl
sin
(coot
-
i)
+
w2
sin
(oat
-
;)
+
w3
sin
(coot
+
i)
+
w4
sin
(coot
-
;)]e
(4)
For this response to equal zero, it is necessary that
w1
+
w4
=
0
w2
-
w3
=
0
Thus the set of weights that satisfies the signal and noise
response requirements can be found by solving
(3)
and
(5)
simultaneously. The solution is
1
w1
=
3,
w2
=
2,
w3
=
T,
Wq
=
-
T.
With these weights, the array will have the desired proper-
ties in that it will accept a signal from the desired direction,
while rejecting a noise, even
a
noise which is at the same
frequency
fo
as the signal, because the noise comes from
a
different direction than does the signal.
The foregoing method of calculating the weights is more
illustrative than practical. This method is usable when there
are only a small number of directional noise sources, when
the noises are monochromatic, and when the directions of
the noises are known
a
priori.
A practical processor should
not require detailed information about the number and the
nature of the noises. The adaptive processor described in
the following meets this requirement. It recursively solves
a sequence of simultaneous equations, which are generally
overspecified, and it finds solutions which minimize the
mean-square error between the pilot signal and the total
array output.
1
1
1
(6)
CONFIGURATIONS
OF
ADAPTIVE
ARRAYS
Before discussing methods of adaptive filtering and signal
processing to
be
used in the adaptive array, various spatial
and electrical configurations of antenna arrays will
be
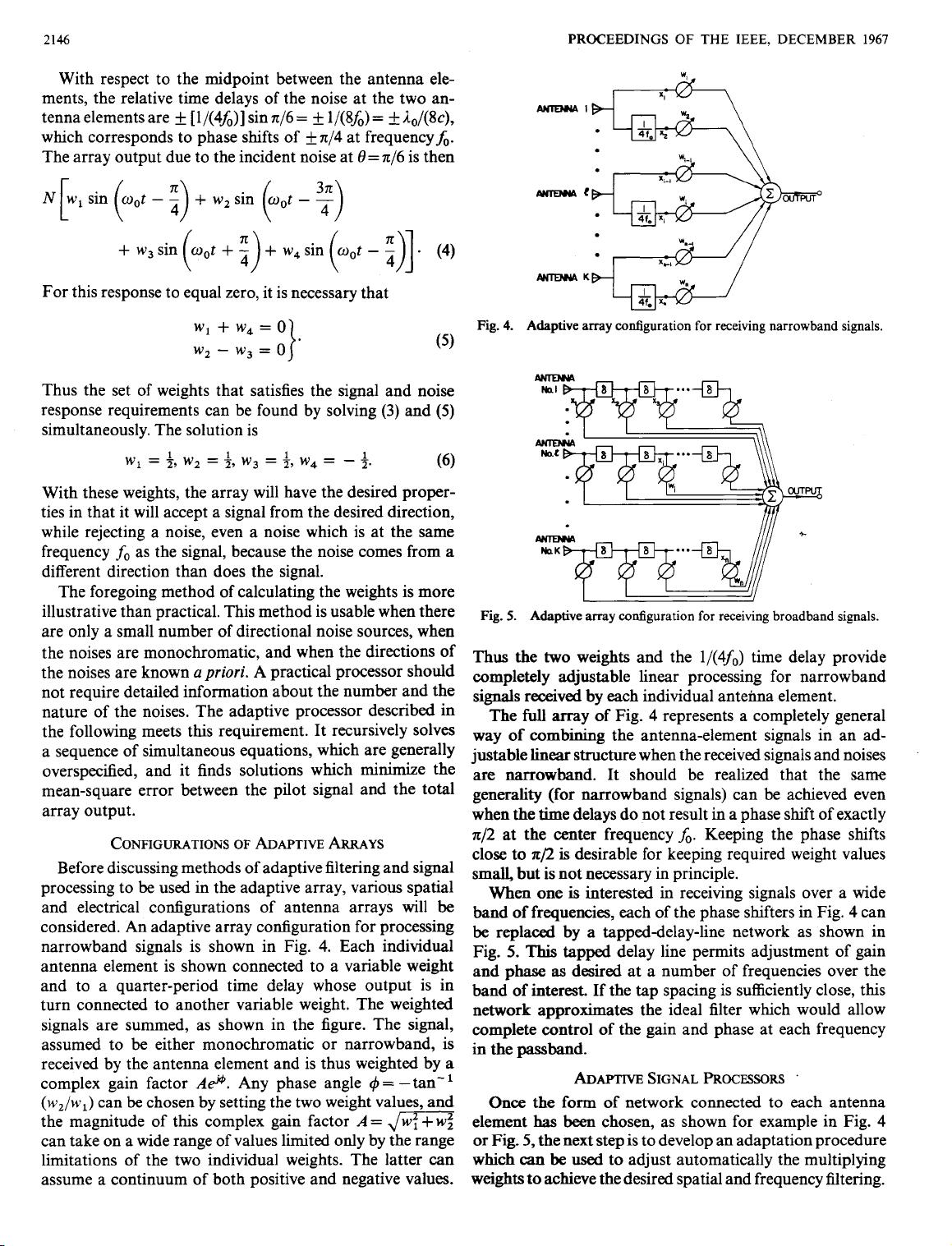
considered. An adaptive array codguration for processing
narrowband signals is shown in Fig. 4. Each individual
antenna element is shown connected to a variable weight
and to
a
quarter-period time delay whose output is in
turn connected to another variable weight. The weighted
signals are summed, as shown in the figure. The signal,
assumed to
be
either monochromatic or narrowband,
is
received by the antenna element and is thus weighted by a
complex gain factor
A&.
Any phase angle
4
=
-tan-
(w2/w1)
can
be
chosen by setting the two weight values, and
the magnitude of ths complex gain factor
A=
,/-
can take on a wide range of values limited only by the range
limitations of the two individual weights. The latter can
assume a continuum of both positive and negative values.
""Kv
-
4f.
x.
Fig.
4.
Adaptive
array
configuration for receiving narrowband signals.
1/11
L
I
I
Fig.
5.
Adaptive
array
configuration for receiving broadband signals.
Thus
the
two
weights and the 1/(4f0) time delay provide
completely adjustable linear processing for narrowband
signals
received by each individual antenna element.
The full array
of
Fig. 4 represents a completely general
way of combining the antenna-element signals in an ad-
justable
linear
structure when the received signals and noises
are narrowband. It should be realized that the
same
generality (for narrowband signals) can be achieved even
when the time delays do not result
in
a
phase shift
of
exactly
742
at
the center frequency
fo.
Keeping the phase shifts
close to
n/2
is
desirable for keeping required weight values
small,
but
is
not necessary in principle.
When one
is
interested in receiving signals over a wide
band
of
frequencies, each of the phase shfters in Fig.
4
can
be
replaced
by
a
tappeddelay-line network as shown in
Fig.
5.
This
tapped
delay line permits adjustment of gain
and
phase
as
desired at a number of frequencies over the
band of interest. If the tap spacing is sufficiently close, ths
network approximates the ideal filter which would allow
complete control of the gain and phase at each frequency
in the
passband.
ADAPTIVE
SIGNAL
PROCESSORS
'
Once
the form of network connected to each antenna
element
has
been
chosen, as shown for example in Fig. 4
or Fig.
5,
the next step is to develop an adaptation procedure
which
can
be
used
to adjust automatically the multiplying
weights to achieve the desired spatial and frequency filtering.
剩余16页未读,继续阅读
2010-08-05 上传
2022-09-23 上传
115 浏览量
2015-06-02 上传
2010-08-05 上传
256 浏览量
115 浏览量
113 浏览量
点击了解资源详情

qungeabc
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- regextester.zip
- jquery窗帘样式顶部滑动下拉登陆窗口
- post-box
- video2hls:准备要与HLS流式传输的视频
- qmlmoment:QML 就绪的 moment.js 端口
- 我的问题解决:我在算法,数据结构等方面的研究历史
- mediapipe_app
- QuickXSS:使用Bash自动化XSS
- 学生信息管理系统代码.zip
- Desktop.zip
- Feed2Mail notifications-crx插件
- discovery-demo
- Python超级
- personal-site:在Firebase上托管的React网站展示了我的生活
- Generate to Lately-crx插件
- karma-webdriver-example:将 Karma 0.9.2 与 WebDriver 和 Sauce Labs 一起使用的示例项目
