激光雷达遥感详解:扫描方式与传感器类型
版权申诉
激光雷达遥感课件3详细介绍了遥感传感器的各类类型及其在机载激光雷达系统中的应用。主要内容分为两大部分:扫描方式与构像方程。
首先,扫描方式是机载激光雷达数据获取的关键步骤。课件列举了四种常见的扫描方式:
1. 摆镜扫描:通过电机驱动反射镜在特定角度范围内反复移动,形成连续的激光束扫描路径。
2. 旋转正多面体扫描:棱镜的旋转使得反射光束方向在一定范围内变化,从而实现地面的逐点覆盖。
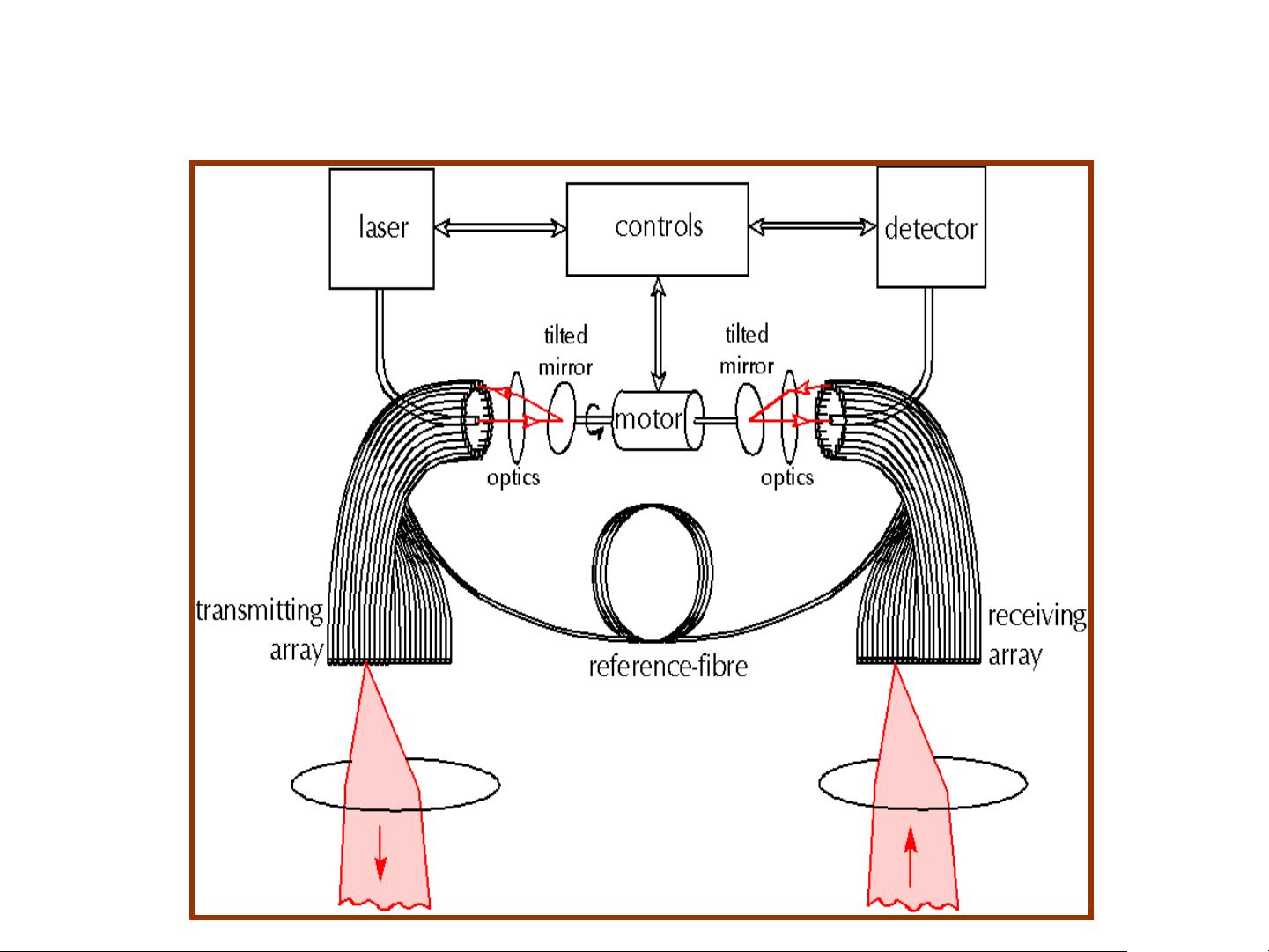
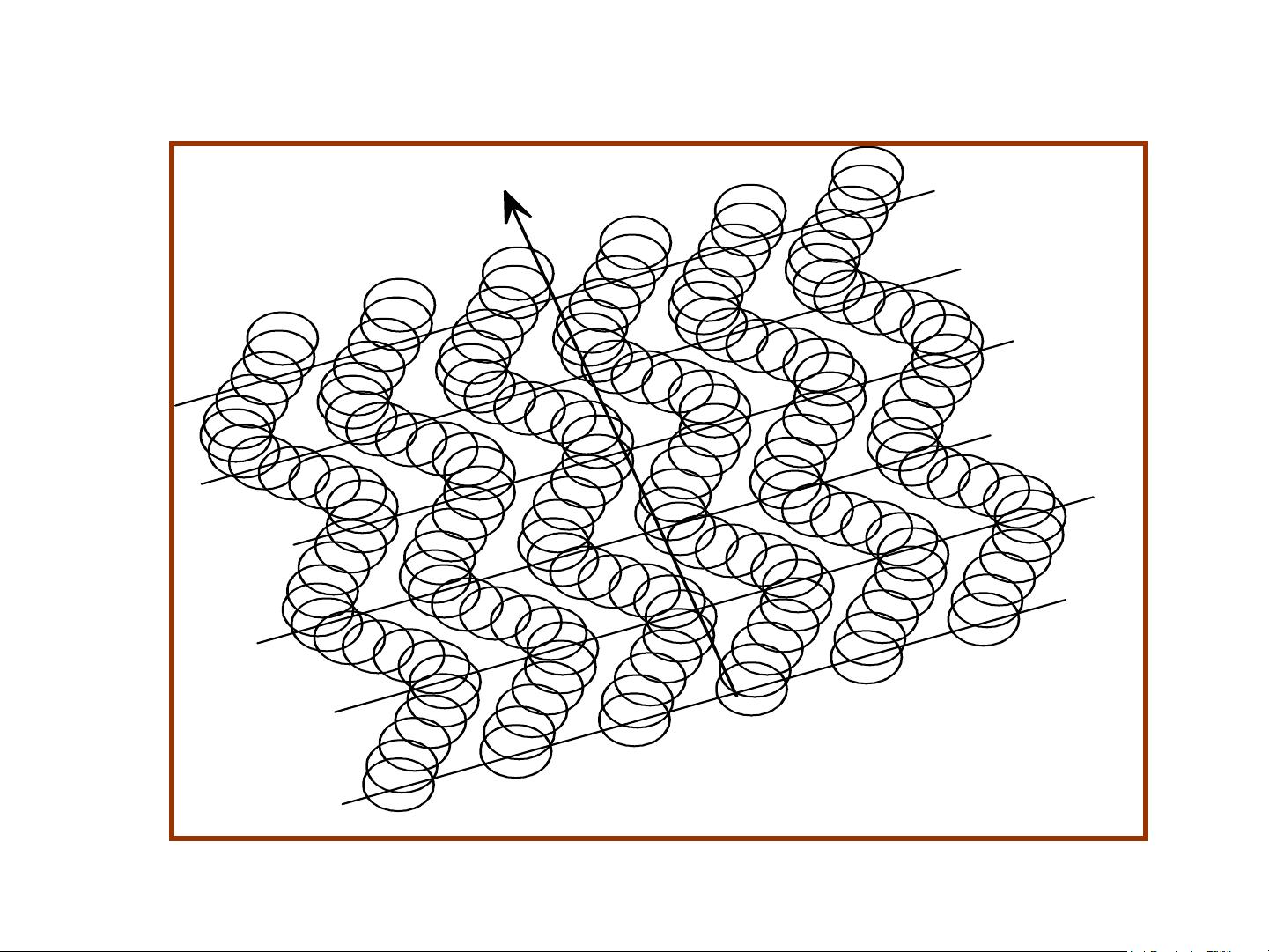
3. 光纤扫描:利用光纤传输激光,通过控制光纤的角度变化实现空间扫描,如TopoSys激光系统的光纤扫描仪就是如此。
4. 圆锥镜扫描:通过旋转一个圆锥形镜子,产生椭圆形的扫描轨迹。
构像方程是描述机载激光雷达系统如何从激光信号到地面坐标转换的过程的数学模型。它涉及激光雷达测量到的点到扫描仪的距离、扫描仪的位置信息以及传感器的姿态角(φ、ω、κ)。通过这些参数,可以计算出地面上点的三维坐标,这对于精确的地表测绘和地形建模至关重要。
课件还提到,构像方程中的坐标系变换涉及到传感器坐标系与地面坐标系之间的转换,使用旋转矩阵c、b和a来表示传感器姿态角对坐标变换的影响。通用构像方程详细阐述了这些参数如何结合,使得理论上的测量能够转化为实际的地理坐标。
这门课件深入浅出地讲解了激光雷达遥感的核心技术,对于理解机载激光雷达的工作原理和在地理信息科学、测绘工程等领域中的应用具有重要的参考价值。通过学习这些内容,学生或专业人员能够掌握激光雷达传感器的选择、操作和数据分析方法。

238 浏览量
194 浏览量
363 浏览量
238 浏览量
345 浏览量
194 浏览量
108 浏览量

爱学习的库库
- 粉丝: 207
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 维修中心产品报价清单excel模版下载
- lsvine:`tree -L 2`具有较少的空白屏幕空间
- project_app:这是非常重要的项目
- Newton's method done right:牛顿法求解非线性方程组,包括非平方和不一致方程组-matlab开发
- 现代客厅模型效果图
- 美丽的心型:用Python表达爱意
- command-line-linter
- simpleMapExercise
- SpotifyStalker
- 日记账格式excel模版下载
- dfs:DFS 阵容优化器应用程序的 Github 存储库
- WebProjectWithDjango
- DEF-CON-Links:DEF CON 28安全模式的简易链接和指南
- r7rs-clos:适用于R7RS的微型CLOS包装器
- 小型电影院3D模型
- vscode_ros2
