DSP实现的永磁同步电机伺服控制系统研究
版权申诉
PDF格式 | 3.76MB |
更新于2024-06-13
| 105 浏览量 | 举报
"这篇文档是关于基于数字信号处理器(DSP)的永磁同步电机(PMSM)伺服控制系统的深入研究和实现。作者探讨了PMSM的空间矢量脉宽调制(SVPWM)技术,分析了电机的数学模型,并在Matlab/Simulink环境中构建了双闭环模型以验证调制算法。文章还提出了滑模控制策略来应对非线性问题,以及一种改进的滑模控制算法以减少误差和抖振。此外,文章对直接转矩控制(DTC)方法进行了分析,并通过仿真展示了控制效果。硬件设计中,选用了TI公司的TM320F2812 DSP芯片作为控制核心,软件部分则使用C语言编写,确保高效性和可维护性。最后,该系统在实际伺服平台上进行了测试,表现出优秀的动态和静态特性,控制精度高,符合预期目标。关键词涵盖了PMSM、SVPWM、DTC、滑模控制以及DSP技术。"
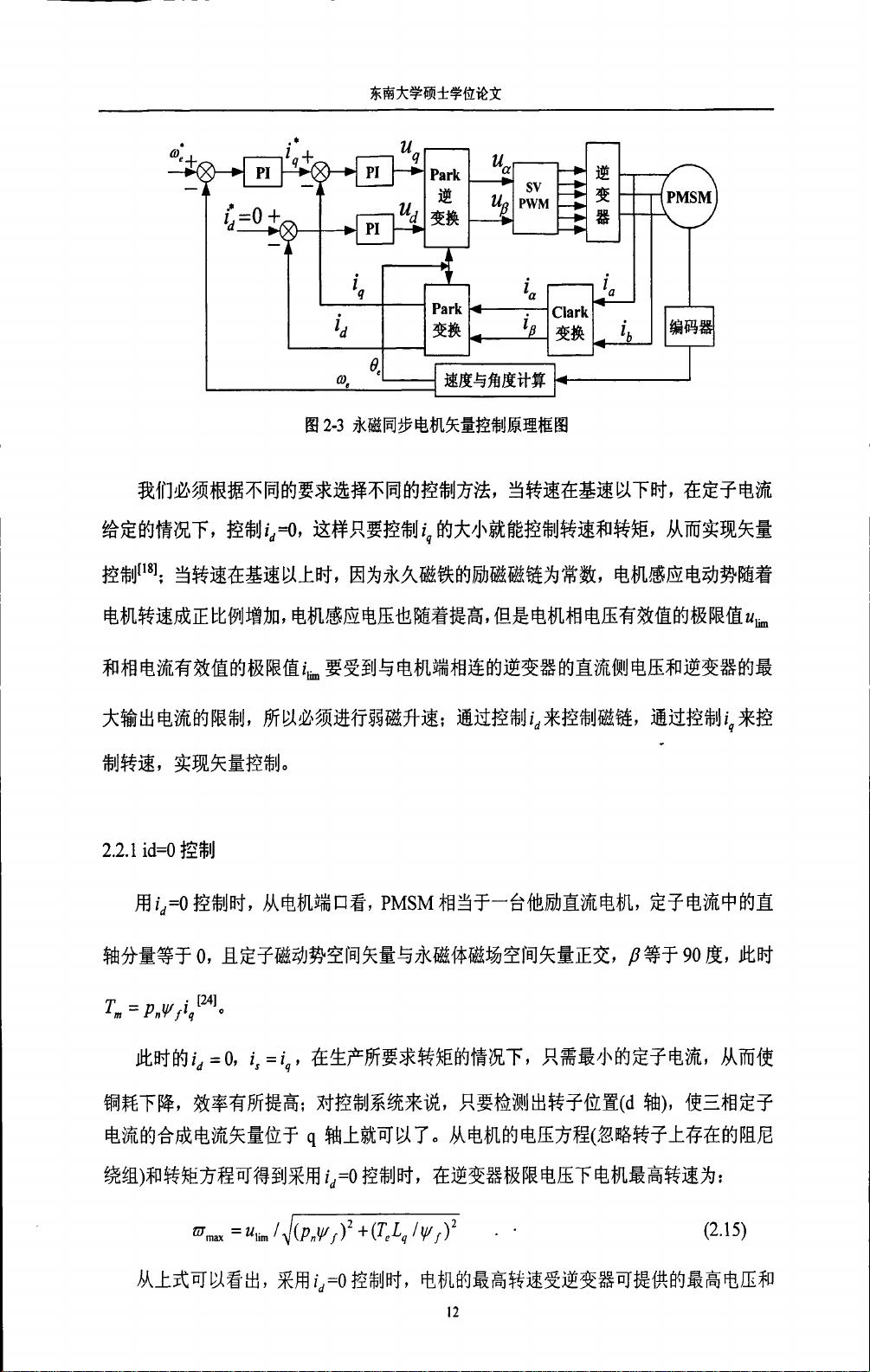
这篇论文详细阐述了基于DSP的PMSM伺服控制系统的设计与实现过程。首先,它介绍了PMSM伺服系统在各个领域的广泛应用,以及其相比直流电机伺服系统的显著优势。接着,作者深入研究了空间矢量脉宽调制技术,这是现代电机控制中的关键部分,能够提高电机效率和动态性能。通过对PMSM的数学模型分析,作者在Matlab/Simulink中创建了一个双闭环模型,用于评估SVPWM算法的性能。
考虑到电机模型的高度非线性,论文提出了一种滑模控制策略,以应对这种复杂性。滑模控制是一种自适应控制方法,能够有效应对不确定性。然而,传统的滑模控制可能会导致误差和抖振,因此作者进一步提出了改进的滑模控制算法,通过仿真验证了其在减少这些不利影响方面的有效性。
此外,论文还讨论了直接转矩控制,这是一种简化控制策略,能直接控制电机的转矩和速度,减少了计算复杂性。通过仿真,作者展示了DTC在PMSM控制中的应用效果。
在硬件设计方面,论文采用了TI公司的TM320F2812 DSP芯片,这是一款专为电机控制设计的高性能处理器。软件系统使用C语言编写,保证了运行效率并易于维护。最后,整个系统在实际的伺服平台上进行了测试,结果证明了该系统在动态响应和控制精度上的优越性,达到了预期的控制目标。这篇论文提供了一套完整的基于DSP的PMSM伺服控制系统设计方案,并通过实验验证了其可行性。
第二章交流永磁同步电机模型及矢量控制原理
杪,以=脚,cos(目)
y,矗=埘,cos(秒一120。)
虬L=施,cos(目一240。)
M为转子磁极轴线与定子A相绕组轴线重合时互感的幅值,,,为等效的励磁电流
幅值,对永磁同步电机来说埘,的值为常数。
三相绕组在空间上呈星形对称分布,而且通入三相绕组中的电流是对称的,不考虑
磁场的各次谐波则有以下条件成立:
厶l=三22=厶3=三
M12=M13=M21=M23=鸠l=坞2=一M,且‘+如+ic=0
刚:矛≤≥黜卜,鼹:;卜3,
I
uB
I=I—pM
R8+p£
一pM
0如I一万,埘,l
sin(p一120。)I
(2.3)
LucJ
l—pM
—pM
R。+础j【.fcJ
【-sill(护一240。)j
以定子A轴轴向为口轴。逆时针旋转90。为∥轴建立@,∥)坐标系(如图2-1)。由(A,
r-f。]
2
r.1
—1/2
引2小一压/2
2.1.2.2永磁同步电机在转子旋转坐标系(d,q)上的模型方程
坐标变换,从数学角度来说,就是将方程式原来的一组变量,用一组新的变量来代
替,使分析计算得到简化。若新旧变量之间为线性关系,则变换为线性变换【22】。
对于永磁同步电机来说,用固定于转子的参考坐标来描述和分析其稳态和动态性能
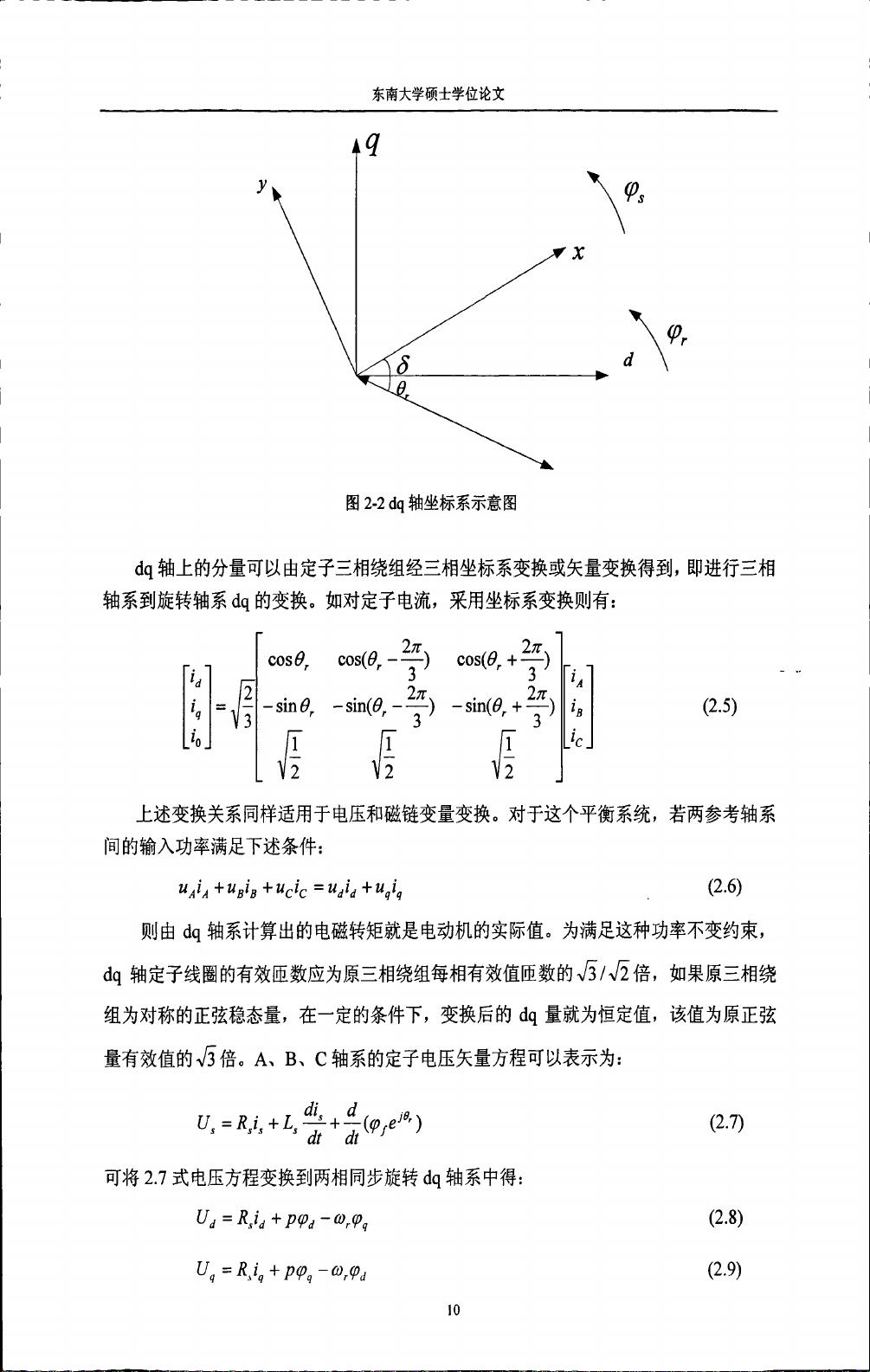
是十分方便的。此时,取永磁体基波励磁磁场轴线(磁极轴线)为d轴(直轴),而q轴(交
轴)顺着旋转方向(此处设为逆时针方向)超前d轴90。电角度。d,q轴系随同转子以电角速
度(电角频率)万,一起旋转。dq轴坐标系如图2—2所示。
4
c、、l
1●●●,●●●j
.0.b.七
—...。..。....................。L
r-●●,●_1
2
2
//
1l一,)
o万

剩余91页未读,继续阅读
相关推荐


ohmygodvv
- 粉丝: 507
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小学水墨风学校网站模板设计
- 深入理解线程池的实现原理与应用
- MSP430编程代码集锦:实用例程源码分享
- 绿色大图幻灯商务响应式企业网站开发源码包
- 深入理解CSS与Web标准的专业解决方案
- Qt/C++集成Google拼音输入法演示Demo
- Apache Hive 0.13.1 版本安装包详解
- 百度地图范围标注技术及应用
- 打造个性化的Windows 8锁屏体验
- Atlantis移动应用开发深度解析
- ASP.NET实验教程:源代码详细解析与实践
- 2012年工业观察杂志完整版
- 全国综合缴费营业厅系统11.5:一站式缴费与运营管理解决方案
- JAVA原生实现HTTP请求的简易指南
- 便携PDF浏览器:随时随地快速查看文档
- VTF格式图片编辑工具:深入起源引擎贴图修改
