计算机视觉算法与应用概览
需积分: 9 136 浏览量
更新于2024-07-17
收藏 53.32MB PDF 举报
"《Computer Vision Algorithms and Applications》是由Richard Szeliski编著的一本关于计算机视觉的专业书籍,适合在本科高年级阶段作为计算机科学和电子工程专业的教学教材。本书深入探讨了计算机视觉领域的算法与应用。"
在计算机视觉这个广泛的领域中,Richard Szeliski的这本书详细介绍了该领域的核心概念、技术和实践应用。它涵盖了从基础的图像处理技术到高级的视觉理解算法。以下是书中可能涉及的一些关键知识点:
1. 图像获取:介绍图像传感器的工作原理,包括数码相机和扫描仪等设备,以及图像的数字表示和色彩模型。
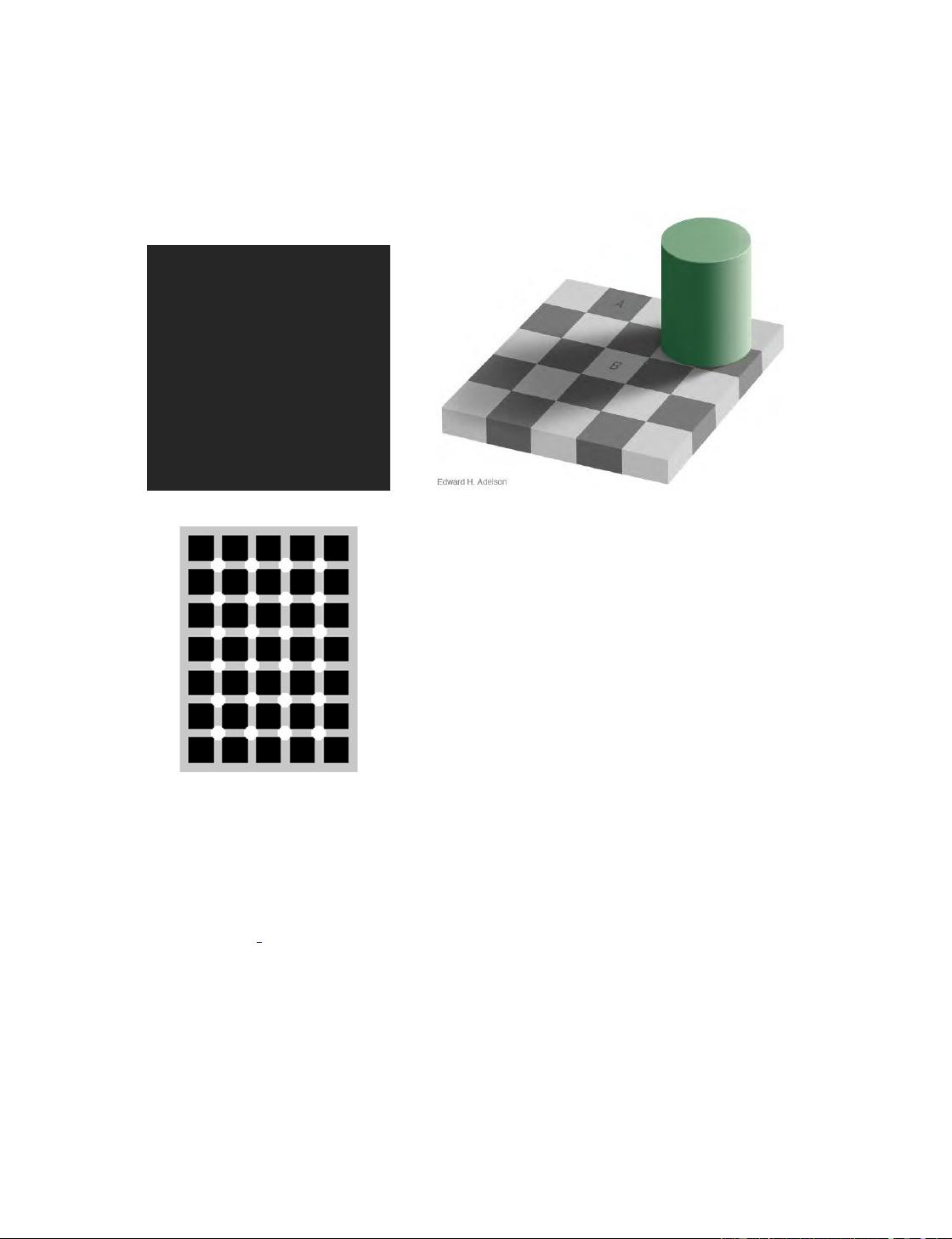
2. 图像处理:涵盖滤波器(如卷积)、边缘检测(如Canny算子、Sobel算子)和图像增强技术,用于改善图像质量和提取特征。
3. 特征检测与描述:如角点检测(Harris角点、Hessian矩阵)、尺度不变特征变换(SIFT)、快速方向梯度直方图(HOG)等,这些特征对于物体识别和匹配至关重要。
4. 目标检测与识别:讲述滑动窗口方法、模板匹配以及基于机器学习的分类器(如支持向量机、随机森林)在目标检测中的应用。
5. 图像分割:包括区域生长、阈值分割、水平集方法等,用于将图像分成有意义的部分或对象。
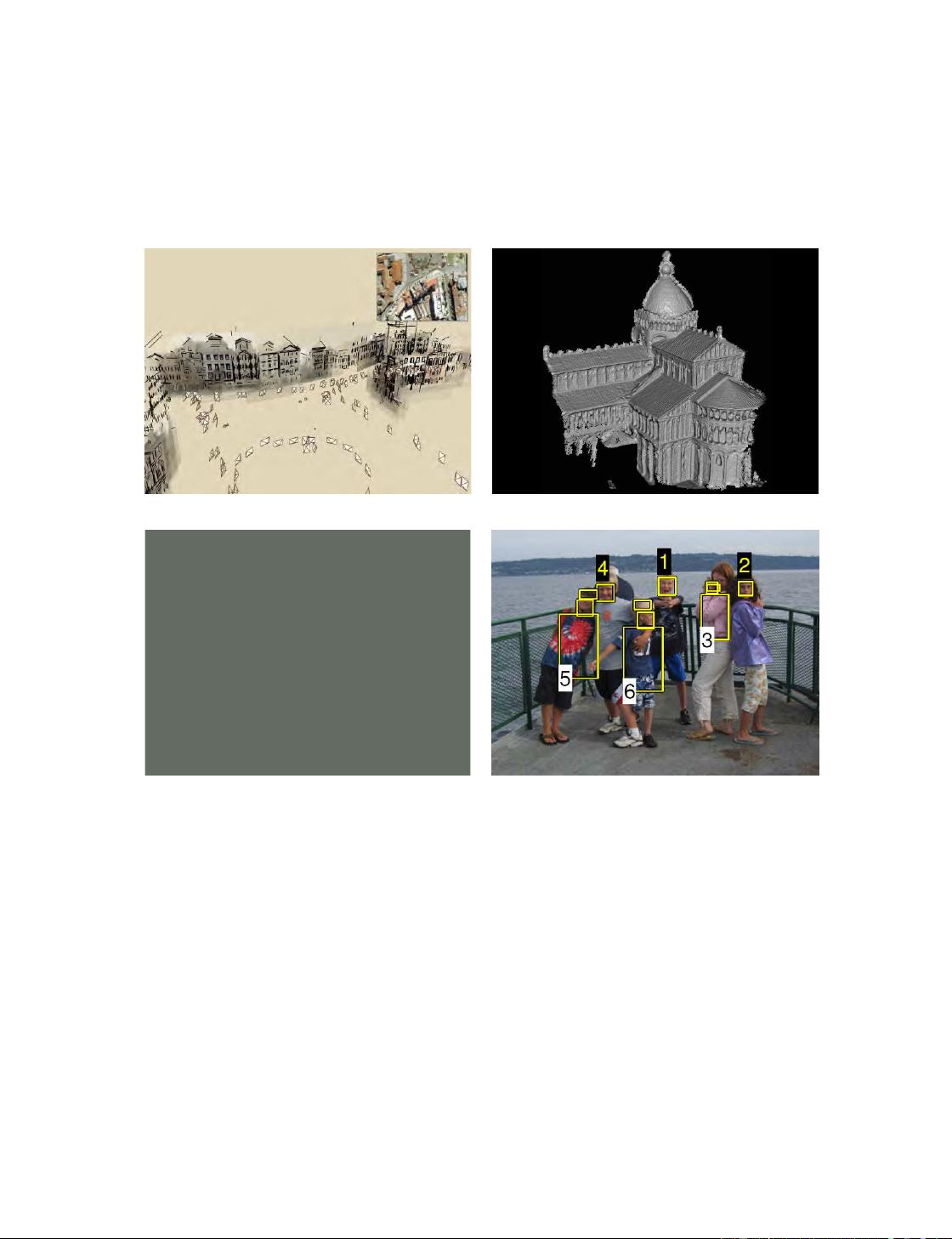
6. 几何建模与恢复:介绍单目和双目立体视觉,用于计算场景的深度信息和三维重建。
7. 运动分析:涵盖光流估计、摄像机运动估计(如Euler角、欧拉法)和结构从运动(Structure from Motion, SFM)技术。
8. 深度学习与卷积神经网络(CNNs):讲解如何利用神经网络进行图像分类、物体检测和语义分割,如AlexNet、VGG、ResNet等经典模型。
9. 应用场景:包括自动驾驶、无人机导航、医学图像分析、人脸识别、视频监控等领域。
10. 实践与工具:讨论OpenCV库的使用,这是一个广泛使用的开源计算机视觉库,包含了大量的图像处理和计算机视觉算法。
此书不仅提供了理论基础,还强调了实际应用,是学习和教授计算机视觉的理想教材。通过阅读和实践,读者能够掌握计算机视觉的基础知识,并有能力开发自己的视觉系统和应用。同时,书中可能还包括对版权和法律问题的讨论,提醒读者在使用相关技术和内容时遵守法律法规。

Contents
A.1.3 QR factorization ............................649
A.1.4 Cholesky factorization .........................650
A.2 Linear least squares ...............................651
A.2.1 Total least squares ...........................653
A.3 Non-linear least squares .............................654
A.4 Direct sparse matrix techniques .........................655
A.4.1 Variable reordering ...........................656
A.5 Iterative techniques ...............................656
A.5.1 Conjugate gradient ...........................657
A.5.2 Preconditioning .............................659
A.5.3 Multigrid ................................660
B Bayesian modeling and inference 661
B.1 Estimation theory ................................662
B.1.1 Likelihood for multivariate Gaussian noise ..............663
B.2 Maximum likelihood estimation and least squares ...............665
B.3 Robust statistics .................................666
B.4 Prior models and Bayesian inference ......................667
B.5 Markov random fields ..............................668
B.5.1 Gradient descent and simulated annealing ...............670
B.5.2 Dynamic programming .........................670
B.5.3 Belief propagation ...........................672
B.5.4 Graph cuts ...............................674
B.5.5 Linear programming ..........................676
B.6 Uncertainty estimation (error analysis) .....................678
C Supplementary material 679
C.1 Data sets .....................................680
C.2 Software .....................................682
C.3 Slides and lectures ...............................689
C.4 Bibliography ..................................690
References 691
Index 793
xx

剩余827页未读,继续阅读
389 浏览量
260 浏览量
2010-10-02 上传
2010-10-02 上传
2013-06-12 上传
162 浏览量
2024-04-14 上传
607 浏览量

clf2017
- 粉丝: 0
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- 花式滑块分配
- vue-editor.md.zip
- shoukakkou:具有社交功能的地图工具
- 鲸鱼优化算法WOA实现函数极值寻优python.rar
- symbol-openapi-generator:为Symbol SDK生成并部署OpenAPI生成的客户端库
- mono-gaussian-processes:单调和单峰高斯过程的Stan模拟
- pubg:简单干净的pubg播放器统计数据和比赛跟踪器
- EZDML for linux64 V3.01版
- dsa:DSA Spring'21
- XX经营管理思路及目标汇报
- Unity3d-Finite-State-Machine:直观的Unity3d有限状态机(FSM)。 在不牺牲实用性的情况下着重于可用性的设计
- ChatStats:获取有关您的Facebook群聊的统计信息
- rasa_flight
- EZDML for mac64 V3.01版
- lct-ui:LCT v4 用户界面
- blendercolorize
