Step7中PID控制功能块详解:SFB41/FB42/FB43的实战应用
需积分: 50 97 浏览量
更新于2024-07-31
2
收藏 1.51MB PDF 举报
"本篇文章详细介绍了如何在Step7编程环境中编写PID控制程序,针对西门子S7系列CPU,主要涉及了三个关键功能块:SFB41/FB41(连续调节)、SFB42/FB42(步进控制)和SFB43/FB43(脉冲宽度调制器,PULSEGEN)。文章首先概述了PID控制的基本概念和在工业自动化中的应用,包括不同类型的控制器设计(如连续控制器、比例控制器、级联和混合控制器等)。
在实际操作中,步骤如下:
1. 选择PID系统控制器:根据控制系统的需求,可能选择连续控制器用于连续过程控制,或者比例控制器用于精确调整。文章列举了各种控制器类型的特点和适用场景,如单循环和多循环比例控制器,以及多级控制器如二级和三级控制器。
2. 布线与参数设置:编写PID程序时,需要遵循特定的布线规则,包括连接电缆、屏蔽端接和安全警告等。同时,使用参数赋值工具,通过用户界面调试PID参数,并利用在线帮助资源。
3. 功能块实现:
- SFB41/FB41 (CONT_C):连续调节功能块,负责实时计算并存储控制数据,适用于需要连续控制输出的设备,如恒温器。
- SFB42/FB42 (CONT_S):步进控制功能块,适用于需要按预定步骤执行的控制任务,如电机控制。
- SFB43/FB43 (PULSEGEN):脉冲宽度调制器,常用于产生周期性信号,如驱动加热或冷却设备。
4. 在用户程序中的使用:在Step7编程环境中,通过调用功能块,结合背景数据块(DB)来组织程序结构,确保功能块能被正确地多次调用,并与其他模块配合实现PID控制逻辑。
5. 功能块举例:文章最后提供了实际案例,展示了如何将这些功能块集成到循环中断程序中,以构建一个具备比例执行机构脉冲输出的控制器。
本文是Step7编程中编写PID控制程序的一个全面指南,旨在帮助读者理解PID控制原理,熟悉相关功能块的使用方法,并能在实际项目中高效应用。"
PID_FB41_FB42_FB43
SLC A&D CS Page 9 of 49
图 6
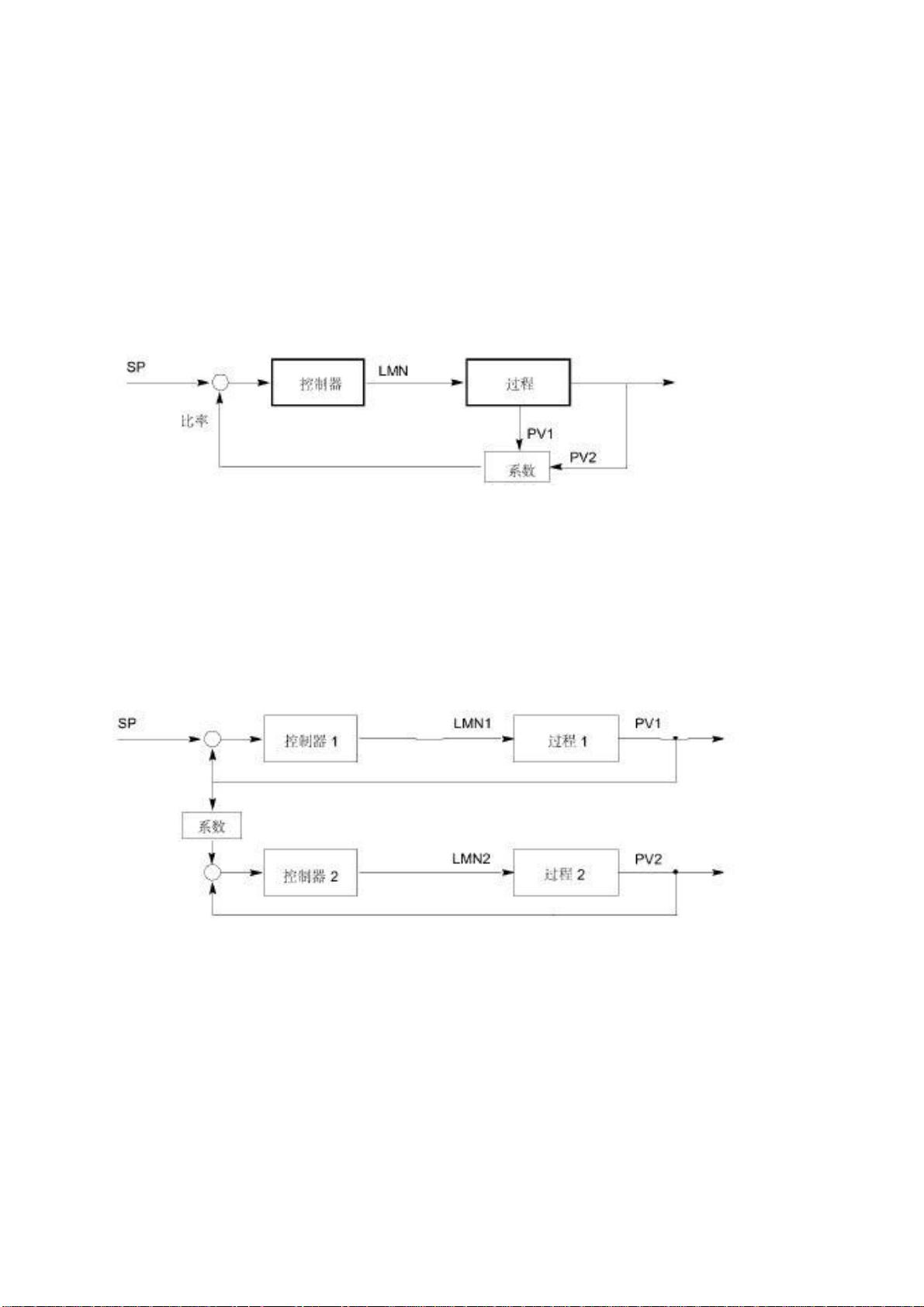
2.5 比例控制器
2.5.1 单循环比例控制器
单循环比例控制器,可以用于“两个过程变量之间的比率”比“两个过程变量的绝对数值”重
要的场合。(例如,速度控制)。(如图 7)
图 7
2.5.2 多循环比例控制器
对于多循环比例控制,两个过程变量 PV1 和 PV2 之比保持为常数。因此,可以使用第一个控
制循环的过程数值,来计算第二个控制循环的设定点。对于过程变量 PV1 的动态变化,也可
以保证保持特定的比例。(如图 8)
图 8
2.6 二级控制器
一个二级控制器只能采集两个输出状态(例如,开和关)。典型的控制为:一个加热的系统,
通过继电器输出的脉冲宽度调制。
www.gongkong365.com

剩余48页未读,继续阅读
264 浏览量
1409 浏览量
200 浏览量
2021-08-30 上传
324 浏览量
2019-09-18 上传
2021-11-17 上传

lingfeng841010
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- ATKPackage_Win10_64_VER100057.zip
- 位数预测:Интерфейссматрицей28х28клетокдлярисования,ивыводпредсказаниясетидлянарисованоон
- davecastillo:Flask + Dropbox-API + Bootstrap 图像滑块 = davecastillo.com
- hb_java_roll1j2_believedah2_
- Node-RED-Telldus-to-MQTT-bridge:Node-RED代码以从Telldus Live API获取数据,然后将数据发布为MQTT消息
- cub3D:在迷宫中创建动态视图的图形项目
- 智慧交通培训-V.zip
- Personal_Website:这是我的个人网页
- ERP管理系统源码.zip
- p8::joystick:兼容性层,可在monome norns上运行PICO-8脚本
- youtrack-githooks
- 基于FPGA的数字频率计(VHDL).zip
- Tools_and_Technologies_Learning:各种技术和工具学习脚本
- excel函数与公式---第一篇 基础知识
- github-org-overview:扫描github组织的所有存储库,并检查是否已发布
- 第7章案例代码.zip
