ADIS16480:10自由度动态姿态IMU传感器数据手册
版权申诉
97 浏览量
更新于2024-07-11
收藏 1.11MB PDF 举报
ADIS16480是一款由亚德诺半导体(ADI)生产的10自由度惯性测量单元(IMU),专为高精度动态环境中的应用设计。该数据手册提供了关于这款传感器的详细信息,包括其核心特性、性能指标和规格。
首先,ADIS16480的主要特点是动态角度输出,支持多种角速度和姿态表示方法,如四元数(Quaternion)、欧拉角和旋转矩阵。这使得它能够提供连续且精确的三维姿态信息,这对于无人机导航、机器人控制、虚拟现实等领域至关重要。
在精度方面,ADIS16480在静态条件下展现出优秀的表现,其 pitch 和 roll 的误差仅为0.1°,而 yaw 的误差为0.3°。这意味着在静止状态下,传感器能够提供极高的姿态稳定性。动态范围内,陀螺仪的精度可达±450°/s,确保在高速旋转时也能准确跟踪。
为了保证设备的初始对准以及长期运行的准确性,ADIS16480还具有良好的定向精度,即orthogonal alignment小于±0.05°,以及6°/hr的在运行偏移(bias stability)。此外,随机漂移(random walk)为0.3°/√hr,这意味着长时间运行下的累积误差非常低。
非线性度仅为0.01%,表明传感器的输出与输入线性关系保持得非常好,这对于需要精确加速度测量的应用非常重要。ADIS16480集成了三个数字加速度计,量程达到±10g,可以准确测量设备的加速度变化,无论是重力还是冲击力。
除了传统的加速度和角速度数据,它还提供三角轴的delta angle和delta velocity输出,这些数据对于补偿传感器安装误差和进行实时的姿态修正特别有用。同时,内置的数字磁强计使得系统能够进行磁场测量,为磁力导向或地磁定位功能提供补充。
总体来说,ADIS16480是一款高性能的IMU,结合了高精度的角速度和加速度测量、稳定性和低非线性度,适合那些对空间定向和运动跟踪有严格要求的应用场景,如航空航天、自动驾驶汽车、工业自动化和消费电子设备等。然而,在实际使用中,用户需要注意遵循数据手册中的建议和注意事项,确保正确地集成和校准传感器,以充分发挥其潜力。
Data Sheet ADIS16480
Rev. 0 | Page 7 of 40
ABSOLUTE MAXIMUM RATINGS
Table 3.
Parameter Rating
Acceleration
Any Axis, Unpowered
2000
g
Any Axis, Powered 2000 g
VDD to GND −0.3 V to +3.6 V
Digital Input Voltage to GND −0.3 V to VDD + 0.2 V
Digital Output Voltage to GND −0.3 V to VDD + 0.2 V
Operating Temperature Range −40°C to +85°C
Storage Temperature Range −65°C to +150°C
1
Barometric Pressure 2 bar
1
Extended exposure to temperatures that are lower than −40°C or higher
than +105°C can adversely affect the accuracy of the factory calibration.
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
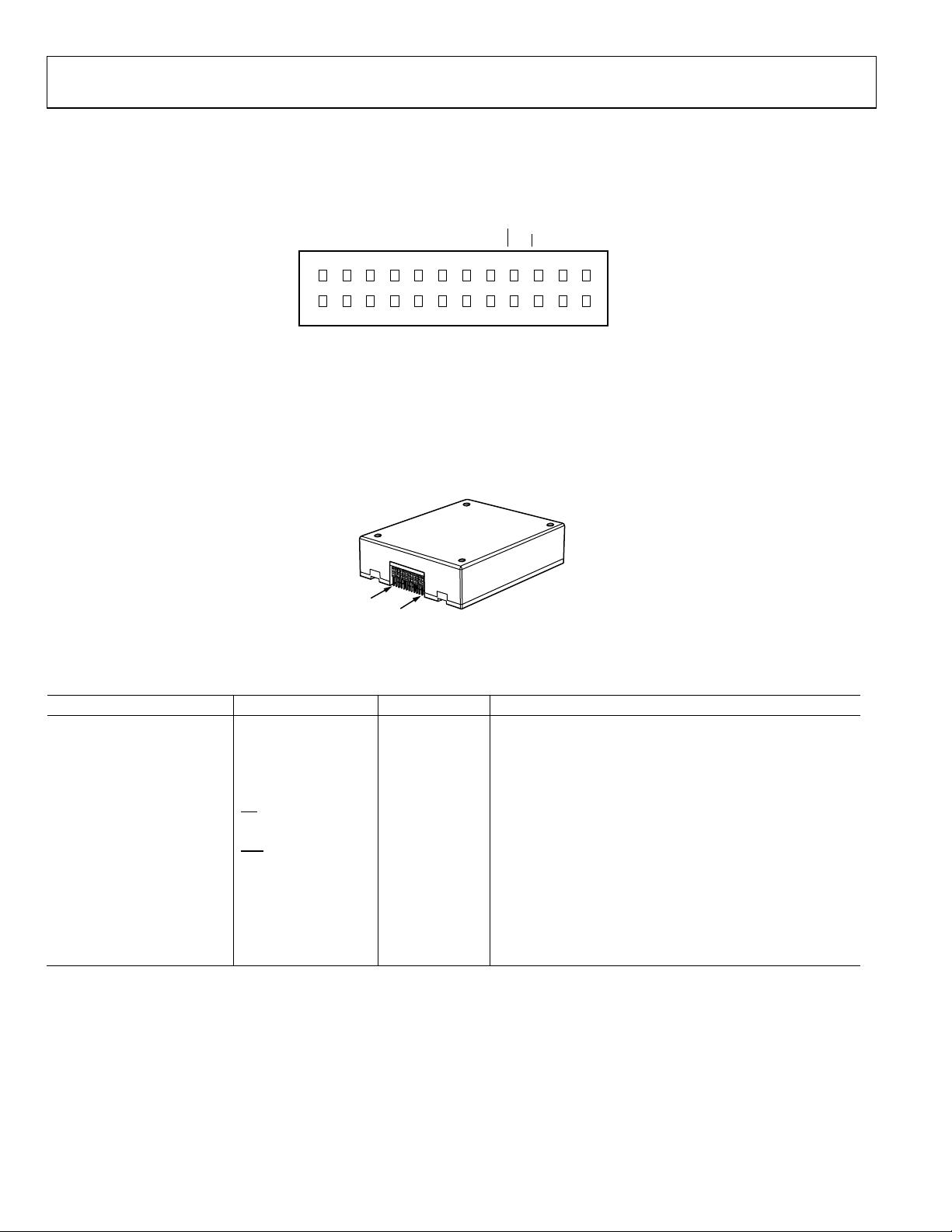
Table 4. Package Characteristics
Package Type θ
JA
θ
JC
Device
Weight
24-Lead Module (ML-24-6) 22.8°C/W 10.1°C/W 48 g
ESD CAUTION
剩余39页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2019-09-16 上传
2021-08-10 上传
2019-10-09 上传
2019-10-14 上传
2020-03-25 上传
2022-07-15 上传

pigheadcookie
- 粉丝: 99
- 资源: 29
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
