3-RPS并联机构几何误差分析:ADAMS仿真研究
140 浏览量
更新于2024-09-05
收藏 386KB PDF 举报
"基于ADAMS的3-RPS并联机构几何误差映射分析,蔡晓江,高峰,黄玉美,李艳。该研究旨在提升并联机床的运动精度,通过对六轴混联镗铣床-6PM2的3-RPS机构进行分析,探讨其几何误差来源。利用ADAMS软件,构建了包含所有几何误差参数的机构运动学模型,并通过仿真揭示了不同几何误差参数对终端运动精度的影响规律。"
并联机构在精密加工领域中扮演着重要角色,尤其是3-RPS(旋转-旋转-平移)机构,因其独特的结构特性,常被用于高精度机床设计。然而,几何误差是影响并联机构运动精度的关键因素之一,包括关节间隙、构件制造误差、安装误差等。这些误差会直接导致工作台的定位精度下降,影响加工质量。
蔡晓江等人在研究中选取了6PM2并联机床的3-RPS部分作为研究对象,深入分析了其几何误差源。他们利用虚拟样机技术,具体是ADAMS(Automatic Dynamic Analysis of Mechanical Systems)软件,构建了一个全面考虑几何误差的动态模型。ADAMS是一种强大的多体动力学模拟工具,能够准确模拟复杂机械系统的运动行为。
通过ADAMS环境中的仿真,研究人员能够观察到不同几何误差参数如何影响终端执行器的运动轨迹和精度。这一过程称为几何误差的映射分析,它揭示了误差从源头到工作空间的传递路径和效应,为误差补偿策略提供依据。例如,关节间隙可能引起运动不连续性,而构件制造误差可能导致工作台的定位偏差。
研究中,误差映射分析不仅涉及单个误差源,还涵盖了所有可能的几何误差组合,以全面理解误差对整体性能的影响。通过这种方式,可以识别出影响最大的误差源,从而制定针对性的误差补偿措施,如改进设计、优化制造工艺或引入误差校正算法。
这项研究为提高并联机床的运动精度提供了理论基础和实践指导。通过ADAMS的仿真工具,可以有效地评估和控制几何误差,这对于优化并联机构设计,提升高端制造装备的精度和稳定性具有重要意义。同时,该方法也对其他类型的并联机构及其误差分析具有借鉴价值。
基于 ADAMS 的 3-RPS 并联机构几何误差映射分析
蔡晓江
∗
高峰 黄玉美 李艳
(西安理工大学机械与精密仪器工程学院,西安 710048 陕西)
摘要:为提高并联机床运动精度,以六轴混联镗铣床—6PM2 并联部分的3-RPS 机构为结构模型,
分析了机构的几何误差源。在 ADAMS 环境中,建立了含全部几何误差参数的机构运动学模型,并仿
真了各种几何误差参数对终端运动精度的影响规律。根据仿真结果,对并联机构所有的几何误差从
误差源到工作空间的映射情况进行分析评价。
关键词:并联机构,几何误差,误差评价
中图分类号:TG659 文献标识:A
Geometric Errors Mapping Analysis of 3-RPS Parallel Mechanism Based on ADAMS
Cai Xiaojiang Gao Feng Huang Yumei Li Yan
(School of Mechanical and Precision Instrument Engineering, Xi’an University of Technology, Xi’an 710048, China)
Abstract: In order to improve kinematic accuracy of parallel machine tools, taking 3-RPS parallel
mechanism of 6PM2 six-axis milling-boring hybrid machine tool as an instance, various geometric error
sources were analyzed. Using ADAMS software, mechanical kinematics modeling with full geometric
errors were achieved, and the influence law of full geometric errors affecting terminal kinematic accuracy
was simulated. According to simulation, this paper evaluated mappings of full geometric errors of this
parallel mechanism from error sources to working space.
Key words: Parallel Mechanism, Geometric Errors, Error Evaluation
∗
作者简介:蔡晓江(1984-),男,山西大同人,硕士生。E-mail:cxj0927@163.com
前言
并联机构的精度问题仍然是限制其实用化
的主要瓶颈问题。由于结构上的特殊性,并联机
构大都无法实现全闭环控制,这就使并联机构的
精度很大程度上依赖控制模型(逆解模型)的准
确性。理想情况下,应该将包含所有几何误差参
数的位置逆解模型作为控制模型。但一方面考虑
到模型过于复杂将不适合实时控制,另一方面也
会给几何误差参数的辨识工作带来难度,因此得
到一个包含合理数目的几何误差的控制模型更
实际。这就需要对并联机构所有的几何误差从误
差源到工作空间的映射情况进行分析评价,为参
数辨识工作和控制提供理论依据
。
1.3-RPS 并联机构误差模型
1.1 理想 3-RPS 并联机构
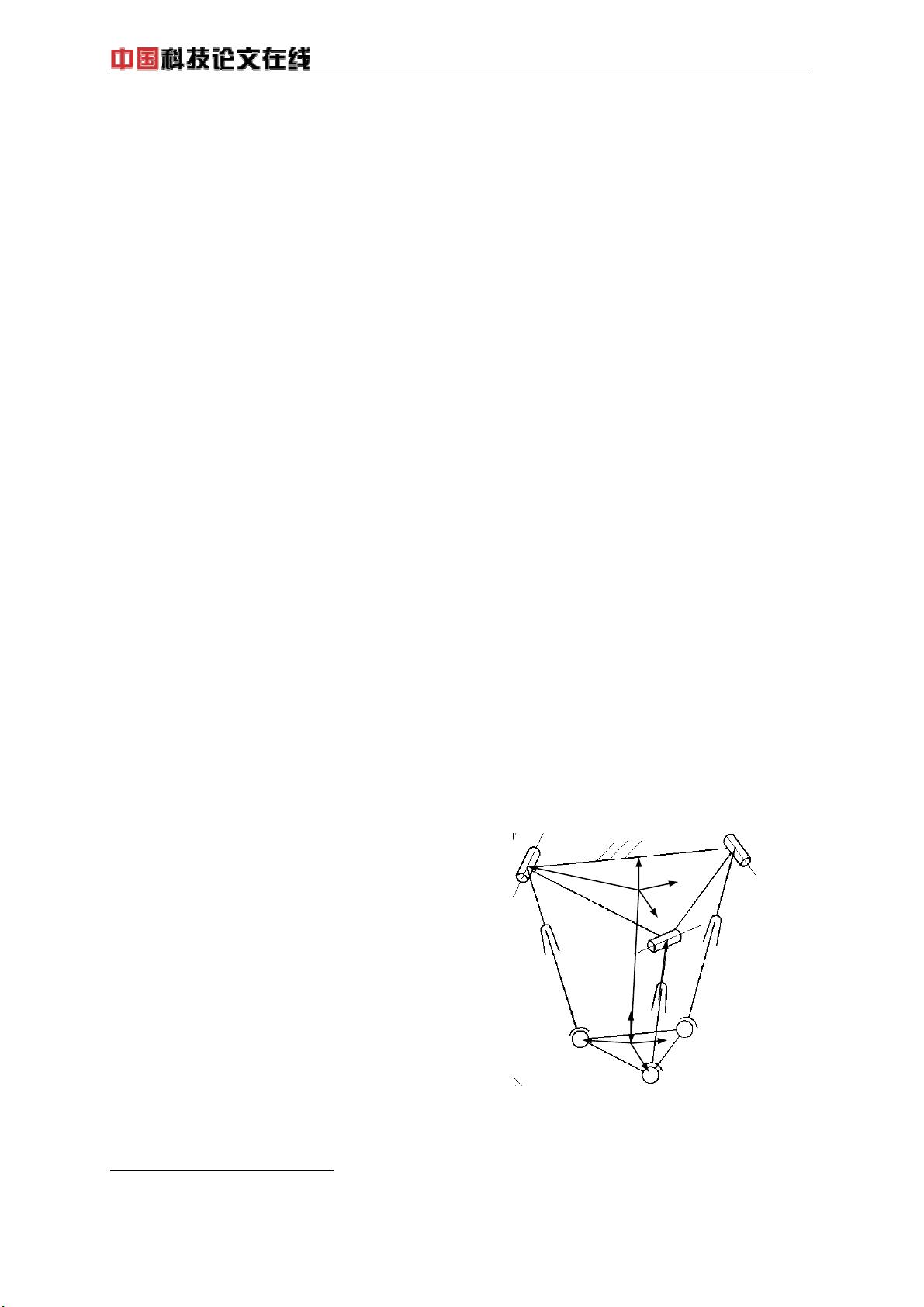
6PM2 混联镗铣床的 3-RPS并联机构结构如
图 1 所示,该机构主要由定平台、动平台和 3
个分支组成。每个分支包括 3 个运动副,其中
转动副(
R
)与定平台的顶点相连,球面副( S )
与动平台的顶点相连,中间的移动副(
P
)驱动
动平台相对于定平台在空间内运动。
S 关节采
用三个
R
关节串联合成的等效关节,三个转动
副轴线的交点为等效球关节
S 的中心。定平台
坐标系
00 0
OXYZ
∑
− 的原点位于定平台的几
何中心点位置,
0
X
轴过
1
A 点并平分
213
AAA∠ ,
0
Y 轴与
23
AA连线平行,
0
Z
轴垂直于上平台平
且指向上方;动平台坐标系
mm m
mXYZ∑− 的
A
2
A
3
A
1
o
Z
o
Y
o
X
o
Z
m
Y
m
X
m
m
B
2
B
1
B
3
R 关节
S 关节
P 关节
图 1 3-RPS 机构示意图
Fig.1 3-RPS Structure Scheme
http://www.paper.edu.cn
1
下载后可阅读完整内容,剩余5页未读,立即下载
108 浏览量
957 浏览量
415 浏览量
基于Matlab App开发的ADAMS-UPS型并联机构快速建模小程序的实践与应用,基于Matlab App开发的ADAMS-UPS型并联机构快速建模小程序,ADAMS-ups型并联机构快速建模小程
2025-03-07 上传
基于Matlab APP开发的ADAMS-UPS型并联机构快速建模小程序的实践与应用,"基于Matlab App开发的ADAMS-UPS型并联机构快速建模小程序",ADAMS-ups型并联机构快速建模
2025-02-12 上传
2025-01-17 上传
2024-12-31 上传
133 浏览量
957 浏览量

weixin_38504170
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebDrive v16.00.4368: 简易易用的Windows风格FTP工具
- FirexKit:Python的FireX库组件
- Labview登录界面设计与主界面跳转实现指南
- ASP.NET JS引用管理器:解决重复问题
- HTML5 canvas绘图技术源代码下载
- 昆仑通态嵌入版ASD操舵仪软件应用解析
- JavaScript实现最小公倍数和最大公约数算法
- C++中实现XML操作类的方法与应用
- 设计编程工具集:材料重量快速计算指南
- Fancybox:Jquery图片轮播幻灯弹窗插件推荐
- Splunk Fitbit:全方位分析您的活动与睡眠数据
- Emoji表情编码资源及数据库查询实现
- JavaScript实现图片编辑:截取、旋转、缩放功能详解
- QNMS系统架构与应用实践
- 微软高薪面试题解析:通向世界500强的挑战
- 绿色全屏大气园林设计企业整站源码与多技术项目资源
