MSP430G2553控制下的简易旋转倒立摆设计与实现
153 浏览量
更新于2024-09-02
收藏 360KB PDF 举报
本文主要探讨了简易旋转倒立摆及其控制装置的设计与实现。系统的核心是基于Texas Instruments的MSP430G2553微处理器,这款单片机以其低功耗和高效的处理能力为特点,适合实时控制系统的应用。导电塑料电位器作为角度传感器,负责测量摆杆的位置,其模拟信号被MSP430G2553的10位ADC转换,以便精确计算摆动角度。
系统设计分为两个关键部分。首先,主控模块的选择注重性能与成本的平衡。对比了8位MCU如51或AVR、PIC等入门级方案,这些方案虽然价格低廉且资料丰富,但功能和计算能力有限。最终,MSP430G2553因其内存、闪存和快速信号采集能力的优势被选中,配合MSP430LaunchPad开发板,提供了方便的软件仿真和调试环境。
其次,电机驱动方面,文章考虑了直流伺服电机和步进电机的优缺点。直流伺服电机虽然调速性能优越,但结构复杂且价格昂贵,不适合此项目。步进电机因其步进控制的特性,无需额外检测电机角度,节省了成本,但震动问题通过细分驱动器得到了解决,选用大扭力42系列电机以保证系统的稳定运行。
角度传感器的选择同样考虑了性能和成本,凌阳MXD2020EL传感器虽简单易用,但可能在抗干扰性和精度上有所欠缺。SCA60C传感器则因抗干扰性强、低功耗以及模拟电压输出而被选中,这有助于减少外界干扰并提高信号的可靠性。
本文通过对不同组件和技术的评估,成功设计出了一套既能满足控制要求,又兼顾成本和效率的简易旋转倒立摆控制系统。通过PID控制算法对摆杆角度和旋臂旋转进行精确控制,经过反复实验验证,该系统部分实现了设计目标,为电子竞赛或其他控制类项目提供了一个实用的参考案例。
简易旋转倒立摆及控制装置简易旋转倒立摆及控制装置
本文介绍旋转倒立摆及控制装置的设计与制作,系统以MSP430G2553为主控、导电塑料电位器检测摆角、通过
步进电机实现旋臂控制从而达到摆杆倒立。根据旋转倒立摆的数学模型分析,确定了摆杆角度和旋臂旋转之间的
PID控制算法,并在实验中优化控制参数。经反复试验,证明系统部分实现了题目的设计要求。
1、总体设计方案
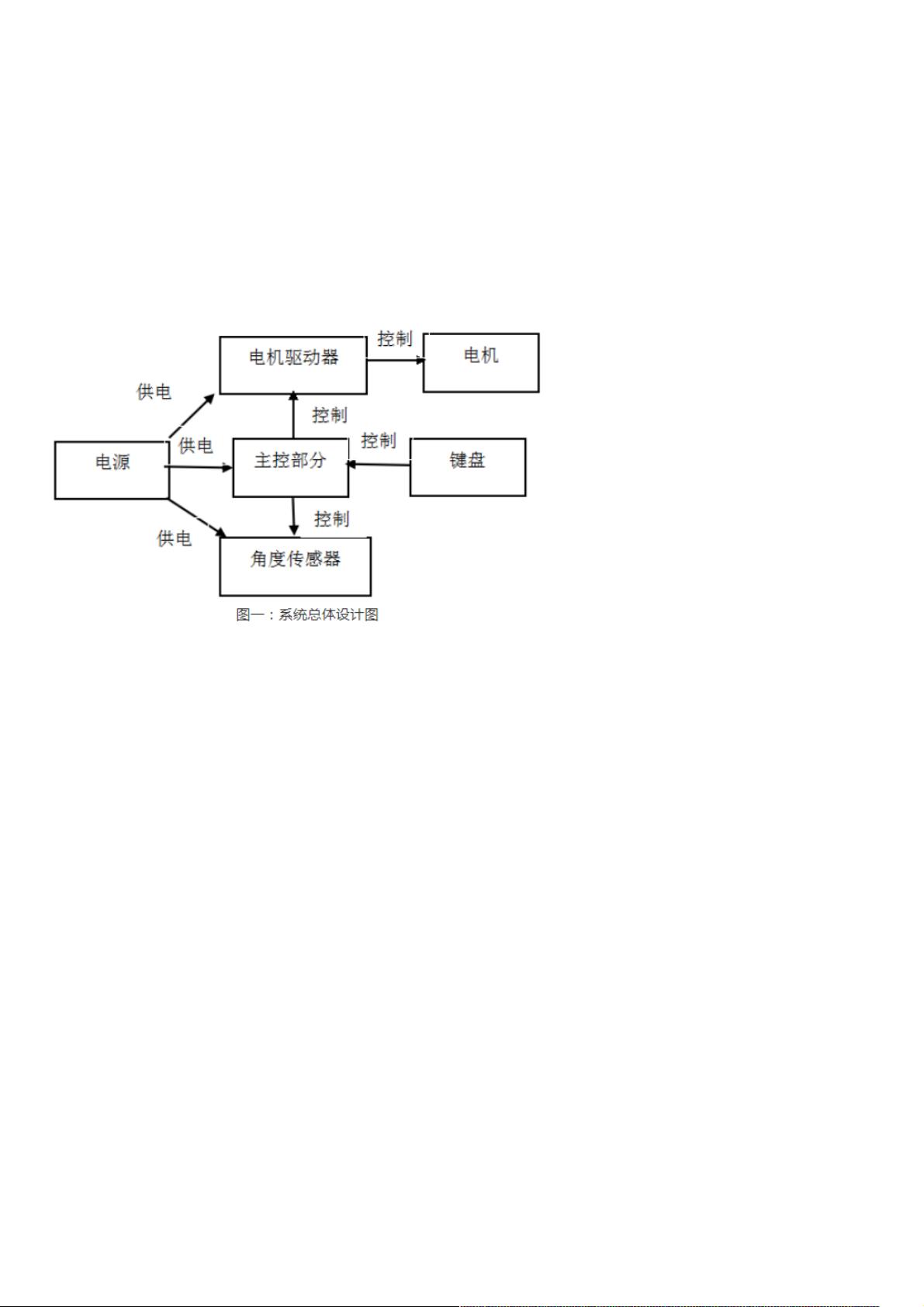
1.1、系统总体设计
本系统硬件包括主控芯片、导电塑料电位器、步进电机、摆杆、旋臂及支架,设计总体框图如图。该系统采用
MSP430LaunchPad开发版做为主控模块,MSP430G2553单片机自带10位ADC。角度传感器(导电塑料电电位器)将采集到
的模拟信号送到单片机进行AD转换与处理,进而判断摆杆的偏摆方向和角度,经过计算后输出相应控制信号给电机驱动器,控
制步进电机正反转和转速变化,从而达到使摆杆保持倒立。
1.2、方案比较与选择
1)主控芯片的比较与选择
方案一:采用入门级51或者AVR、PIC等流行已久的8位MCU作主控。
价格低廉,资料众多。功能有限,计算能力有限。
方案二:采用MSP430系列的MSP430G2553
简易旋转倒立摆系统要求处理器具有足够的内存、闪存,快速的信号采集能力,因此我们选用手头现有的MSP430LaunchPad
板,集成仿真器,方便软件仿真调试,板上为MSP430G2553单片机,该单片机超低功耗,运算速度快,性价比高。
2)电机的比较与选择
方案一:采用直流伺服电机作为执行元件。
优良的调速特性,调速平滑、方便、调整方位宽;过载能力强,。直流伺服电机工作在闭环状态时相对于开环状态要增加很多
检测元件,使电路复杂,最重要的是直流伺服电机价格昂贵,成本太高。
方案二:采用步进电机作为执行元件。
步进电机具有快速启停能力,而且步进电机的转动角度可开环控制,可省去电机转动角度的检测电路,但步进电机存在转动时
震动较大,为减小震动,我们采用细分驱动器驱动步进电机,使电机转动平稳。
因此我们选用42系列大扭力电机。
3)角度传感器的比较与选择
方案一:采用凌阳公司的MXD2020EL传感器。在正常工作下,传感器将测到的倾角直接转换为占空比不同的频率输出。
方案二:采用SCA60C传感器。该传感器抗干扰能力强,低功耗,输出信号为0.5V-4.5V的模拟电压。
方案三:采用精密可调电位器。采集其可调断随摆杆摆动时的输出的电压,经过AD模数转换变为数字信号后交给单片机处理。
以上三种传感器,MXD2020E和SCA60C都相对容易控制和计算,但他们的测量精度不够高,反应速度不够快,无法满足设计
的需求。考虑到模型制作条件极其简陋,摆轴的制作及于传感器连接困难,所以选取用导电塑料电位器作为角度传感器,采集
模拟信号再转换成数字信号测量的方法,且直接用传感器转轴做为摆轴,模型制作简单,故选用WWD35D4导电塑料电位器作
下载后可阅读完整内容,剩余5页未读,立即下载
2021-12-22 上传
2023-11-11 上传
2023-10-18 上传
2023-10-18 上传
2015-11-04 上传
2024-09-02 上传
2019-07-29 上传
2023-08-22 上传
2023-09-17 上传

weixin_38706951
- 粉丝: 4
- 资源: 930
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
