Multirate数字滤波器:基础与应用探索
需积分: 14 152 浏览量
更新于2024-07-17
收藏 3.5MB PDF 举报
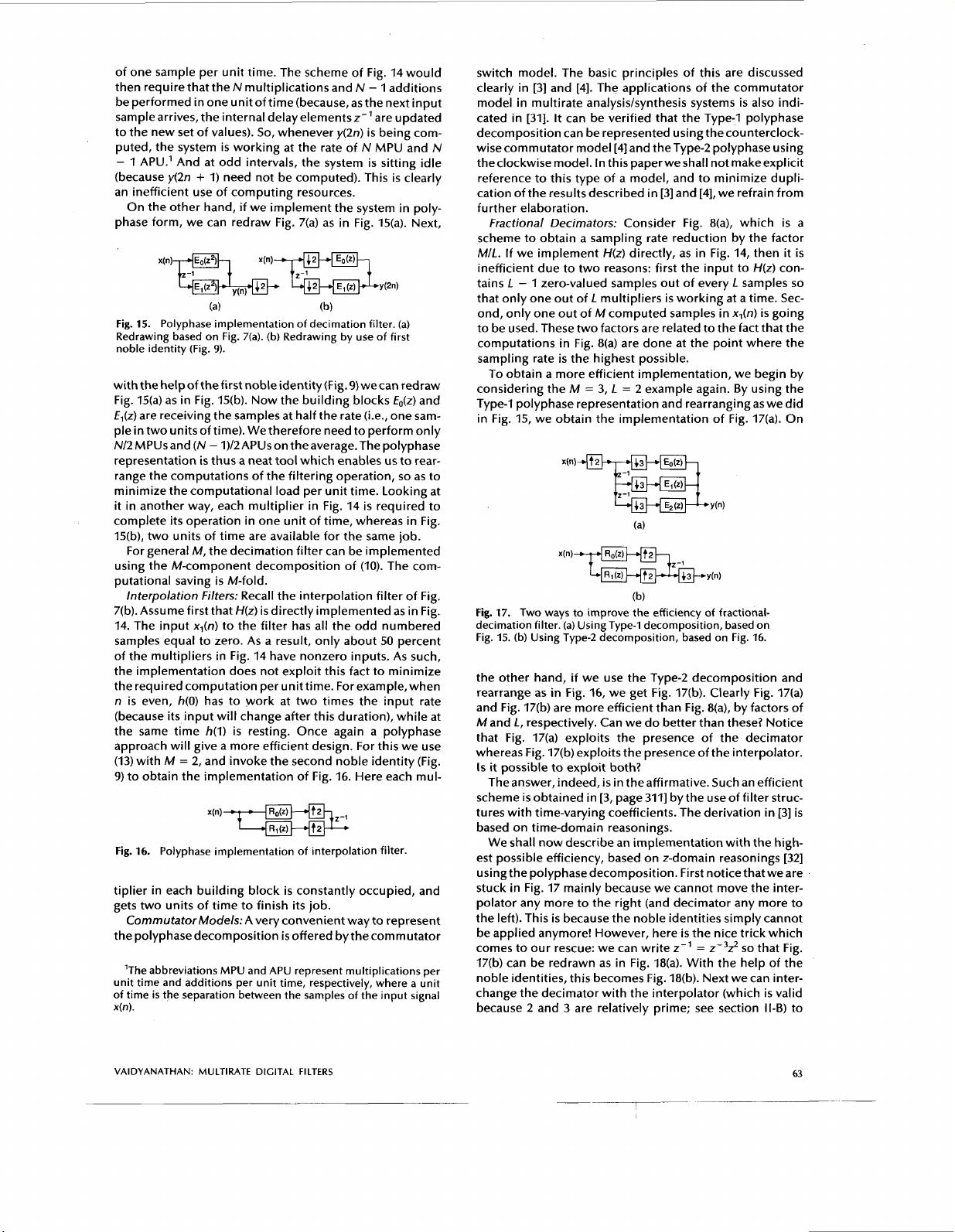
"这篇文章是关于多速率数字滤波器、滤波器银行和多相网络在通信、语音处理、图像压缩、天线系统、模拟语音隐私系统以及数字音频产业中的应用的一个教程。它概述了多速率数字信号处理(DSP)的基础概念和构建模块,并讨论了近年来的研究进展,包括降采样和升采样滤波器的设计、分析/合成滤波器银行(又称正交镜像滤波器,或QMF)以及新的采样定理的发展。此外,还介绍了一些具体的应用场景,如波形的子带编码、语音隐私系统、整数和分数采样率转换(如在数字音频中)、数字交叉网络以及窄带滤波器系数的多速率编码。M带QMF滤波器银行也得到了特别的讨论。"
在多速率数字信号处理中,滤波器和滤波器银行是关键组件。滤波器用于修改信号的频率特性,而滤波器银行则可以将信号分解为多个子带,每个子带通过独立的滤波器处理,这样可以实现高效的数据压缩、信号分析和编码。多相网络是一种用于实现多速率滤波器的结构,它可以将单个滤波器分解为多个更简单的阶段,这些阶段在不同的时钟速率下运行,从而提高处理效率并简化设计。
正交镜像滤波器(QMF)是滤波器银行的一种特殊形式,它在保持信号的低频成分的同时,可以有效地对高频成分进行处理。QMF在音频编码、图像压缩等领域有着广泛的应用,因为它们能提供良好的频谱局部化和较低的计算复杂度。
多速率系统的采样率转换是另一个重要主题。无论是降采样还是升采样,都涉及到重新调整信号的采样频率,以适应不同的系统要求。在数字音频领域,这通常用于改变音频的播放速度而不改变音调,或者适应不同的存储和传输带宽。
此外,文章还探讨了子带编码技术,这是一种将信号分解为多个频带然后分别编码的方法,常用于语音压缩和图像压缩,以减少数据量同时保持可接受的信号质量。
最后,多速率编码在窄带滤波器系数的应用中也很重要,这种技术允许在不同速率下处理滤波器的参数,对于实时通信和自适应滤波等应用场景非常有用。
这篇教程涵盖了多速率数字信号处理的多个核心概念和技术,对于理解和应用这些技术在实际工程问题中具有很高的价值。

be of good quality retaining naturalness and voice char-
acteristics. These features have indeed been achieved by
Cox et
al.
[29].
At the receiver end, y(n)
is
again split into subbands, and
the time-segments of the subbands unshuffled to get xk(n),
which can then be interpolated and recombined through
the synthesis filters.
Iv.
THE
POLYPHASE
DECOMPOSITION
4ND
ITS
APPLICATIONS
The polyphase decomposition, which originated from the
work by Bellanger et
a/.
[Ill,
is
very fundamental to many
applications in multirate DSP. These include efficient real-
time implementation of decimation and interpolation fil-
ters, fractional sampling-rate changing devices, uniform
DFT filter banks, and perfect-reconstruction analysiskyn-
thesis systems. More recently, the polyphase idea has been
applied for the derivation of new sampling theorems [30],
and for recovering bandlimited signalsfrom non-uniformly
sampled versions. In this section the basic concept
is
intro-
duced and some of the aforementioned applications are
elaborated. Section
IX
deals with the remaining applica-
tions. To avoid repetitions, results presented in [3], [4] are
reviewed only briefly here.
A. The Polyphase Decomposition
senting a digital filter. We can rewrite H(z) in the form
Let H(z)
=
E:=-,
h(n)z-" be a transfer function repre-
H(z)
=
[.
.
.
+
h(-4)z4
+
h(-2)1
+
h(0)
+
z-'[
-
* *
+
h(-3)z4
+
h(-l)z2
+
h(2)zT2
+
h(4)~-~
+
*
.
.I
+
h(1)
+
h(3)z-Z
+
. .
.].
(5)
If
we use the abbreviations
m m
Eo(z)
=
c
h(2n)z-", El(z)
=
h(2n
+
l)z-"
(6)
n=-m
n=-m
we can re-express (5) in the form
H(z)
=
Eo(z2)
+
z-'E1(z2).
(7)
Basically, we have merely grouped the impulse-response
coefficients h(n) into even numbered samples eo(n)
=
h(2n)
and odd-numbered samples e,(n)
=
h(2n
+
1). Denoting the
z-transforms of eo(n) and el(n) by Eo(z) and E,(z), respectively,
we obtain the relation (7). This representation will be called
the two-component polyphase decomposition of H(z). The
quantities
Eo(z)
and E,(z) are called the polyphase compo-
nents of H(z).
As
an example, let H(z)
=
1
+
2z-'
+
5z-'
+
4~-~. Then
H(z)
=
1
+
5z-'
+
z-'[2
+
4z-*],
so
that Eo(z)
=
1
+
5z-' and E,(z)
=
2
+
4z-l.
Note that the representation of (7) holds whether H(z)
is
FIR or
IIR.
For example, let
-l
By using the identity
1
-
x
=
(1
-
x')/(l
+
x),
we can rewrite
(8)
as
so
that Eo(z)
=
1/(1
-
a'z-') and
El(z)
=
a41
-
a'z-').
In an exactly analogous manner,
it
is
possible to repre-
sent H(z) in the M-component polyphase form
M-I
H(z)
=
c
z-kEk(zM).
(1
0)
k=O
Once again Ek(z) are called polyphase components and the
coefficients ek(n) and
(11)
In other words, the impulse response sequence
{h(n)}
has
now been grouped into
M
subsequences ek(n).The kth sub-
sequence ek(n)
is
mererly the M-fold decimated version of
h(n
+
k). Note that for a given H(z), the quantity Ek(z)
depends on
M.
For example Eo(z) in (7)
is
totally different
from that in (IO). A second subscript (such as Ek,M(~)), which
would make this distinction clear,
is
avoided in this paper
in the interest of simplicity. In most applications
M
is
fixed,
and there
is
no room for confusion.
An important property of the representation
(IO)
is
given
by the following relation:
are given by
ek(n)
=
h(nM
+
k),
0
I
k
5
M
-
1.
M-I
c
H(ZWk)
=
ME,(zM) (12)
k=O
which follows from the property (IC)
of
the quantity
W.
The
z transform Eo(z) of eo(n)
is
thus seen to be equal to
H(z"~W~)IM,
and since eo(n)
is
nothing but the M-fold deci-
mated version of h(n), this gives a proof of the formula (3b)!
Before getting into applications, we shall mention a sec-
ond type of polyphase decomposition which
is
notationally
more convenient in some situations. This
is
given by
M-I
H(z)
=
c
z-(~-'-~)R k(ZM). (13)
It
is
evident that RJz)
is
related to Ek(z) by Rk(z)
=
EM-'
-&),
which
is
just a renumbering of the components. The rep-
resentations (IO) and (13) will be, respectively, called Type
1
and Type 2 polyphase decompositions. Correspondingly,
Ek(z)
and Rk(z),
0
5
k
5
M
-
1
are called Type
1
and Type
2 polyphase components. It
is
important to notice that the
polyphase decomposition can be applied
for
any sequence
x(n)
and
is
not restricted to impulse response coefficients.
B.
Application
in
Sampling-Rate Alteration
In Section
Il-B we mentioned three standard kinds of
sampling-rate alterations, namely decimation, interpola-
tion, and fractional decimation. Each of these involves adig-
ita1 filter H(z), which unfortunatelyoperates at apointwhere
the sampling rate
is
highest (see Figs. 7(a), 7(b) and 8(a)).
These filtering operations can be made more efficient as
described next.
Decimation Filters: Consider again the decimation filter
of Fig. 7(a) with
M
=
2. Supposewe implement H(z) (assumed
FlRof 1engthN)directlyasin Fig.14.Thesystem hastocom-
puteonlytheeven numbered output samples y(2n). Foreach
computed sample we require
N
multiplications and
N
-
1
additions.Assumethatx(n) isarriving in real-timeatthe rate
k
=O
Fig.
14.
Direct implementation
of
FIR
decimation filter.
62
PROCEEDINGS
OF
THE
IEEE,
VOL.
78,
NO.
1,
JANUARY
1990
剩余37页未读,继续阅读
2014-11-18 上传
2018-12-22 上传
2009-04-04 上传
2012-08-09 上传
2021-04-28 上传
166 浏览量
2011-08-13 上传
2011-08-13 上传

u010748717
- 粉丝: 39
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- protel99se的PCB常用封装库(包括USB和可变电阻和三极管等常用的封装)
- VC++ 使用MFC ODBC访问数据库
- cocos-jsc-endecryptor:适用于 Cocos 的 JSC 加解密工具
- MySQL学习仓库。Cover basic and advanced knowledge of MySQL. Lis.zip
- Team-2-Shopping-Cart-Project
- guess-next::crystal_ball:演示应用程序,显示Guess.js与Next.js的集成
- redis-test:在 Scala 中试用 Redis
- TechDegree-Project-7:游戏节目应用
- 交换两幅图像的相位谱.zip
- www.barcastanie.bc:Barcastanie的官方网站
- VC++使用OpenGL实现绘制三维图形
- 敏捷性:Javascript MVC为“少写,多做”的程序员
- apache:安装 Apache 网络服务器
- 2-求职简历-word-文件-简历模版免费分享-应届生-高颜值简历模版-个人简历模版-简约大气-大学生在校生-求职-实习
- react-app4517010552055412
- modelStudio::round_pushpin:用于解释模型分析的Interactive Studio
