欧洲委员会资助的GRASP项目:人类抓握类型分类
需积分: 5 160 浏览量
更新于2024-08-03
收藏 1.85MB PDF 举报
"这篇论文分析并比较了现有的人类抓握分类,综合成一个新的分类系统,称为‘GRASP Taxonomy’,灵感来源于欧洲委员会资助的GRASP项目。该研究仅考虑单手执行的静态和稳定的抓握方式,旨在提取文献中引用的所有不同抓握方式,并以系统化的方式排列。这个分类体系提供了一个通用的术语来定义人类手部配置,对人机交互和实体用户界面等领域至关重要,因为理解人类的手部动作是设计合适接口的基础。在GRASP Taxonomy中,总共找到了33种不同的抓握类型,并根据1) 对立类型,2) 虚拟手指分配,3) 力量、精确或介于两者之间的抓握类型,以及4) 大拇指的位置进行排列。"
在《GRASP Taxonomy of Human Grasp Types》这篇论文中,作者们深入探讨了人类手部抓握的分类学。他们专注于静态和稳定的单手抓握,这是因为这些动作在日常生活中最为常见,也是许多技术应用的核心。GRASP Taxonomy是通过综合现有多种分类方法创建的,旨在提供一个全面的框架,以便更好地理解和描述人类的手部操作。
首先,抓握被归类为不同的对立类型。这可能涉及到手指的不同排列方式,如对齐、交叉或并排等,反映了手部如何适应不同形状和大小的对象。
其次,虚拟手指分配这一概念引入了灵活性,允许将手指视作独立的单元进行分析。例如,某些抓握可能需要大拇指与其他手指的协同工作,而有些则可能主要依赖食指和中指。
接着,论文将抓握分为力量型、精确型或介于两者之间的中间型。力量型抓握通常涉及较大的接触面积和握持力,适合搬运重物;精确型抓握则强调细微的控制,适用于需要精确定位的任务,如拿取小物体。
最后,大拇指的位置在分类中扮演关键角色,因为它可以提供额外的稳定性和多功能性。不同的大拇指位置可以支持各种抓握策略,从对称到非对称,影响抓握的稳定性和效率。
通过这样的分类,GRASP Taxonomy为研究人员和设计师提供了一种标准化的语言,用于讨论和设计与手部交互相关的系统。在人机交互和实体用户界面领域,这种理解有助于开发更符合人体工程学、更加用户友好的产品和服务。此外,它也为机器人技术和仿生学提供了理论基础,帮助构建更接近人类抓握能力的机器手。GRASP Taxonomy是深入研究人类手部动作和其在技术应用中的潜力的一个重要里程碑。
68 IEEE TRANSACTIONS ON HUMAN-MACHINE SYSTEMS, VOL. 46, NO. 1, FEBRUARY 2016
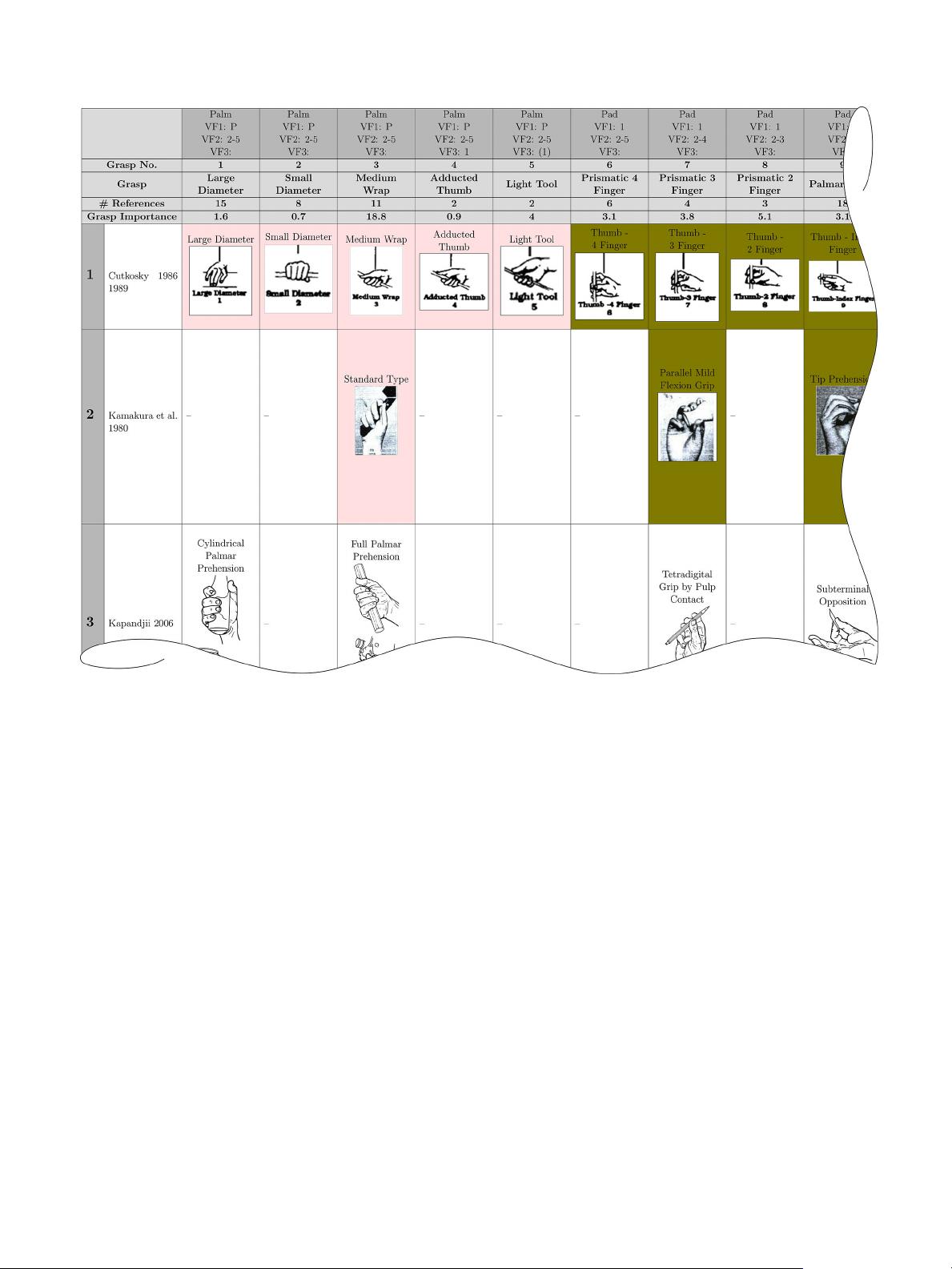
Fig. 2. Comparison of the grasp listings from 22 taxonomy publications found in the literature. Due to the size (22 publications × 47 grasp columns) only
an excerpt of the comparison table is shown. Rows store all grasps from one publications, whereas columns store similar grasps. The sheet allows for direct
comparison of the grasp types by all publications. The full table is available as supplementary material and can be downloaded at grasp.xief.net.
scaling the maximal grasp force theoretically, all disturbances
can be withstand.
The definition rules out:
In-hand motion: Movements that invoke object motion with-
out global hand motion are excluded because the object is not
in a constant relationship to the hand.
Bimanual tasks: Only one hand is to be used.
Gravity-dependent grasps: They do not fit the definition, be-
cause the hand orientation is vital to the grasp stability. If one
turns the hand, the object may fall down, which is not inde-
pendent of the force direction. Grasps listed in the reviewed
taxonomies that are excluded here are, among others, the Hook
Grasp and the Flat Hand Grasp. We chose to exclude those grasps
as most taxonomies are centered on prehensile grasps and be-
cause adding nonprehensile grasps would greatly increase the
complexity of the taxonomy. Related to the classification in
Bullock et al. [24], our classification excludes the whole non-
prehensile category (category: C NP), because the environment
provides the reaction force in those grasps. This would include
motions such as flipping a light switch, rolling a ball on the table
or pressing a key with a finger.
It is interesting to note that grasping a glass of water still fits
into that definition. The glass is sensible to the orientation of the
hand, but this is not because the grasp would lose its stability
if the hand rotates. Just the water would be poured out. The
orientation of the hand is constrained by the object itself, not by
the grasp stability.
B. Comparison Table
We compared 22 comparable taxonomies (see [14], [15], [27],
[28], [34]–[52]), covering a broad range of domains. To facilitate
comparison, all grasp taxonomies were registered in a compari-
son table, where columns store equivalent grasps, and rows store
all grasps defined by an author. Grasps were considered equiv-
alent if the overall hand configuration, the grasped object size,
and the contact surfaces were similar. Due to the size of the table,
only part is shown in Fig. 2. Overall, 211 relevant grasp exam-
ples were found in the reviewed literature sources. Those grasp
examples could be arranged into 47 different grasp types. Of this
set, five grasps violated the grasp definition and were, therefore,
excluded (e.g., hook grasp, platform grasp, push grasp). Some
grasps are only minor variations and were, therefore, not re-
garded as different grasp (eight instances). For example, the
Panoramic Pentadigital Grip (see [15]) was regarded to be sim-
ilar to the precision disk grasp, and the Index Roll Position 2,
剩余11页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-10-19 上传
2021-03-27 上传
2022-09-23 上传
2020-10-05 上传
2010-04-28 上传
2021-06-10 上传

chailiang198413
- 粉丝: 2
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
