
234 IEEE SENSORS JOURNAL, VOL. 11, NO. 1, JANUARY 2011
eter and magnetometer) in order to overcome the drawbacks of
aforementioned papers in this area [8]–[11]. Indeed, the estima-
tion of attitude using fusion technologies with low-cost sensors
such as gyroscopes, accelerometers, and magnetometers has al-
ready been used in other fields. Micro Air Vehicles [1], [3] and
biomedical engineering [4] are examples using either Kalman
filters (KFs) [12], extended Kalman filters (EKFs) [13], or non-
linear observers [14]. It is important to note that the rigid body
attitude estimation using MEMS inertial and magnetic sensors
is useful for calculating the DBA of the moving body, although
the proposed methodology based on the use of these sensors in
not a new one. Nevertheless, we propose another way to com-
bine these measurements and the developed approach still the
first applied work, in our knowledge, in bio-logging.
The main idea of the algorithm is to use a complementary
nonlinear filter coupled with a Levenberg Marquardt Algorithm
(LMA) to process the measurements from a three-axis gyro-
scope, a three-axis magnetometer, and a three-axis accelerom-
eter. The proposed approach combines a strap-down system,
based on the time integral of the angular velocity, with the LMA
that uses the earth’s magnetic field and gravity vector to com-
pensate the attitude predicted by the gyroscope. It is important
to note that the resulting structure is complementary: high-band-
width-rate gyro measurements are combined with low-band-
width vector observations (gravity and earth’s magnetic field)
to provide an accurate attitude estimate. Furthermore, the esti-
mated attitude is used to calculate three components of DBA,
which provides important information about the energy budgets
of free-living animals.
This paper is organized as follows. Section II describes the
prototype design for the bio-logging application. Moreover, the
attitude parameterization, the rigid body kinematic model, and
sensor measurement models are presented. Section III details
the structure of the proposed complementary nonlinear filter for
the attitude and DBA estimation. Sections IV and V are devoted
to simulation and experimental results to illustrate the effective-
ness of the proposed algorithm. Finally, Section VI summarizes
the main conclusions of the paper.
II. M
ATERIALS AND
METHODS
The prototype “logger,” the attitude representation, and
sensor models are described here.
A. Bio-Logging Application: Case Study and Logger Concept
Bio-logging refers to the use of electronic devices (logger)
attached to the animal. The King penguin is one of the
major models of diving birds studied at Strasbourg Uni-
versity thanks to the bio-logging technology [7]. A future
generation of loggers should be equipped with a kinematic
sensing unit (ADIS16405 from Analog Device [15]) that inte-
grates a three-axis accelerometer, a three-axis magnetometer,
and a three-axis gyroscope. It is a micro-fabricated device
that provides digital signals (
g, s, Gauss,
and 23 mm
23 mm 23 mm). The core of the hardware
would be an ATMEGA 644-QFN ultra low-power microcon-
troller [16] including several on-ship peripherals. It should read
digital signals from the ADIS16405 via SPI bus. Other kinds
of sensors need to be implemented in the prototype, such as
a pressure transducer (Keller-3L from KELLER [17]) and a
temperature sensor (TC77 from Microchip [18]) to obtain in-
formation about the animal’s environment. These sensors have
to be periodically sampled with different frequencies, filtered,
corrected from errors and temperature effects, and stored for
postprocessing. The main storage of data is provided by a flash
memory (Micro SD from San Disk [19]). A prototype would be
protected from the effect of low temperature and high-pressure
data by a special material called resin [20] and powered by a
3.6-V lithium battery. To maximize battery life time, the system
should be automatically started for periodically moments of
the day. With these unit and sensors, the power consumption
of the prototype is estimated around 350 mW of which most is
consumed by the sensors. Once the bird returns from a foraging
trip at sea, the logger should be recovered, and all recorded
measurements on the memory are downloaded and used into
the nonlinear filter. Note that the loggers are autonomous and
do not use a satellite or RF transmission.
Before deploying such a logger, the goal in this paper is to
be able to convert the raw data (acceleration, angular rate, and
earth’s magnetic field) into relevant information: attitude and
energy expenditure (DBA). The algorithms that will exploit the
measurements from this prototype are the main concerns of
this work. It is important to note that during preliminary ex-
perimental tests in the paper, equivalent devices available on
the market are used to evaluate the performance of the attitude
estimation algorithm. Then, Inertial Measurement Units were
used, namely, the MTi and MTi-G from Xsens technologies
[21]. These units integrate the main sensors for attitude esti-
mation such as a three-axis accelerometer, a three-axis magne-
tometer, and a three-axis gyroscope.
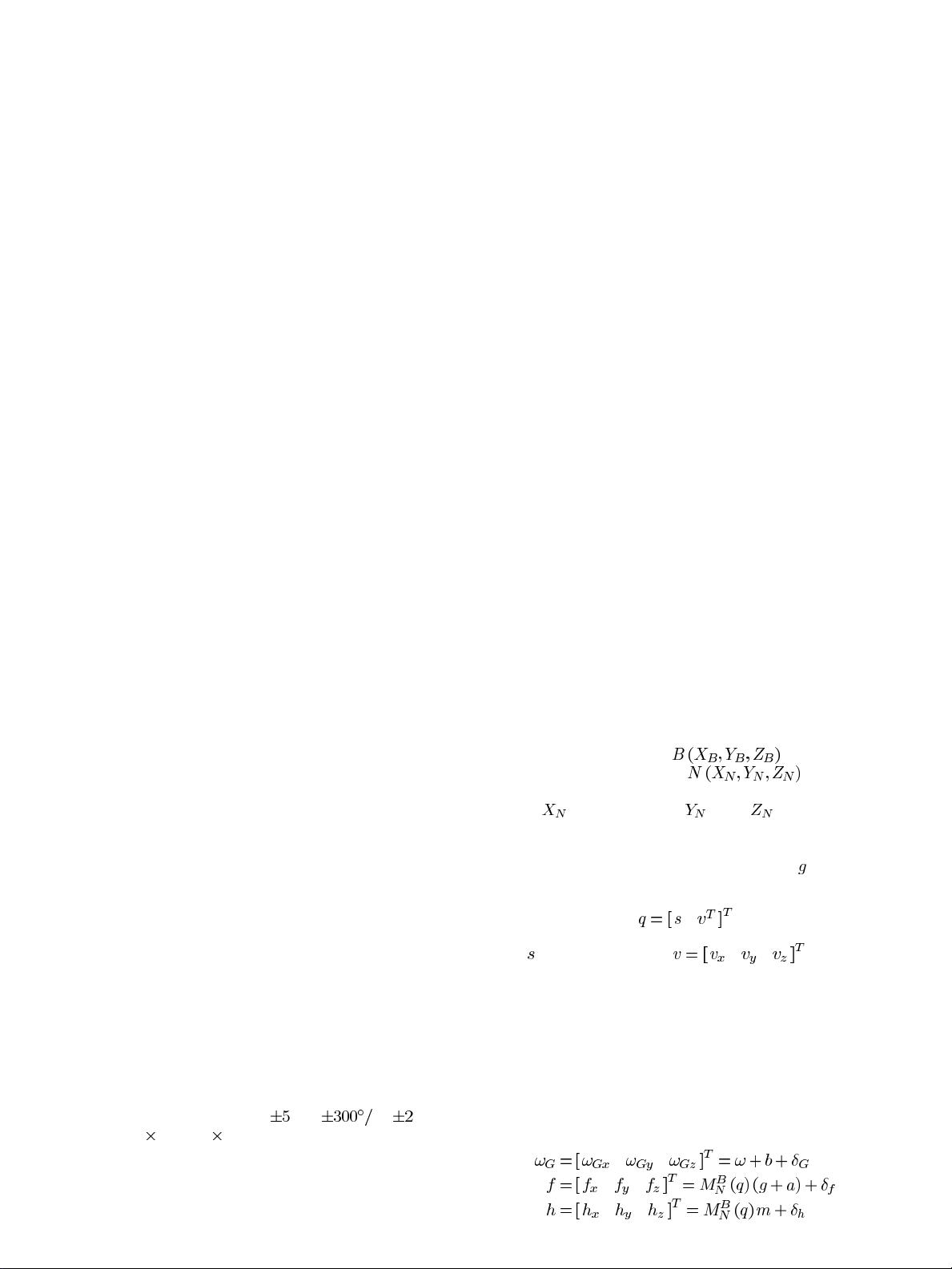
B. Rigid Body Attitude Description
The rigid body attitude in space is determined when the axis
orientation of the body frame
is specified with
respect to the navigation frame
. The naviga-
tion frame is attached to the earth and tangent on its surface
(N-E-D:
: Magnetic North, : East, : Down) [22].
In this paper, we consider the unit quaternion as the mathe-
matical representation of rigid body attitude between the men-
tioned frames. The unit quaternion, denoted by
, is a hyper-
complex number of rank 4 such that
(1)
where
is the scalar part and is the vector
part of the quaternion. We invite the reader to refer to the
Appendix and [23] for more details about quaternion algebra.
C. Sensor Measurement Models
The sensors configuration consists of a three-axis gyroscope,
a three-axis accelerometer, and a three-axis magnetometer con-
taining MEMS technologies [24], [25]. Their theoretical outputs
can be written, respectively, as follows:
(2)
(3)
(4)
剩余12页未读,继续阅读

chief_mate
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 达梦数据库DM8手册大全:安装、管理与优化指南
- Python Matplotlib库文件发布:适用于macOS的最新版本
- QPixmap小demo教程:图片处理功能实现
- YOLOv8与深度学习在玉米叶病识别中的应用笔记
- 扫码购物商城小程序源码设计与应用
- 划词小窗搜索插件:个性化搜索引擎与快速启动
- C#语言结合OpenVINO实现YOLO模型部署及同步推理
- AutoTorch最新包文件下载指南
- 小程序源码‘有调’功能实现与设计课程作品解析
- Redis 7.2.3离线安装包快速指南
- AutoTorch-0.0.2b版本安装教程与文件概述
- 蚁群算法在MATLAB上的实现与应用
- Quicker Connector: 浏览器自动化插件升级指南
- 京东白条小程序源码解析与实践
- JAVA公交搜索系统:前端到后端的完整解决方案
- C语言实现50行代码爱心电子相册教程
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


