倒立摆PID控制与MATLAB仿真研究
需积分: 9 137 浏览量
更新于2024-07-23
3
收藏 3.99MB DOC 举报
"PID控制倒立摆的仿真与实践"
倒立摆系统是一个具有挑战性的控制问题,因其快速、多变量、非线性和不稳定的特性,对其进行控制研究在理论和实践上都具有重要意义。该文主要关注直线一级倒立摆,并采用PID控制策略进行控制设计与仿真。
首先,文章介绍了自动控制的基础知识,包括开环和闭环控制的概念。开环控制系统不依赖于反馈,而闭环控制系统则根据反馈信号进行调整,以实现期望的性能。自动控制系统可以被归类为恒值系统、随动系统和程序控制系统,以及线性与非线性、连续与离散、单输入单输出(SISO)和多输入多输出(MIMO)系统。此外,文中还提到了不同类型的典型环节,如比例、积分、微分、惯性和时滞环节,这些都是构成控制系统的基本元素。
接着,作者详细阐述了MATLAB软件在控制系统仿真中的应用,包括基本功能介绍、仿真的实施和动态仿真。MATLAB的Simulink工具箱允许构建复杂的系统模型,并进行动态行为的模拟,这对于倒立摆系统的控制设计至关重要。
在倒立摆系统部分,文章详细描述了系统组成,包括倒立摆本体、电控箱和其他部件,并分析了其特性。接下来,建立了倒立摆的数学模型,包括微分方程、传递函数和状态空间模型。通过MATLAB进行模型仿真,为后续的控制策略设计提供基础。
PID控制作为经典且实用的控制策略,文章深入探讨了其原理和实现方法。PID控制器结合比例、积分和微分作用,可以有效改善系统的响应速度和稳定性。文章详细讲解了位置式和增量式两种数字PID算法,并讨论了常见的PID控制系统结构,如串级PID,它能提高系统对扰动的抑制能力和控制精度。
最后,作者在MATLAB实时控制软件平台上实现了所设计的PID控制器,进行了实时控制实验,评估了控制器的实时性和抗干扰能力。通过对参数的在线调整和添加干扰,验证了PID控制在倒立摆系统中的效果。
这篇论文通过理论分析、建模和仿真,深入研究了一级倒立摆的PID控制,为实际工程应用提供了理论指导和技术支持。同时,也对未来的控制策略优化和系统性能提升进行了展望。
湖南工业大学本科生毕业设计
(1.4)
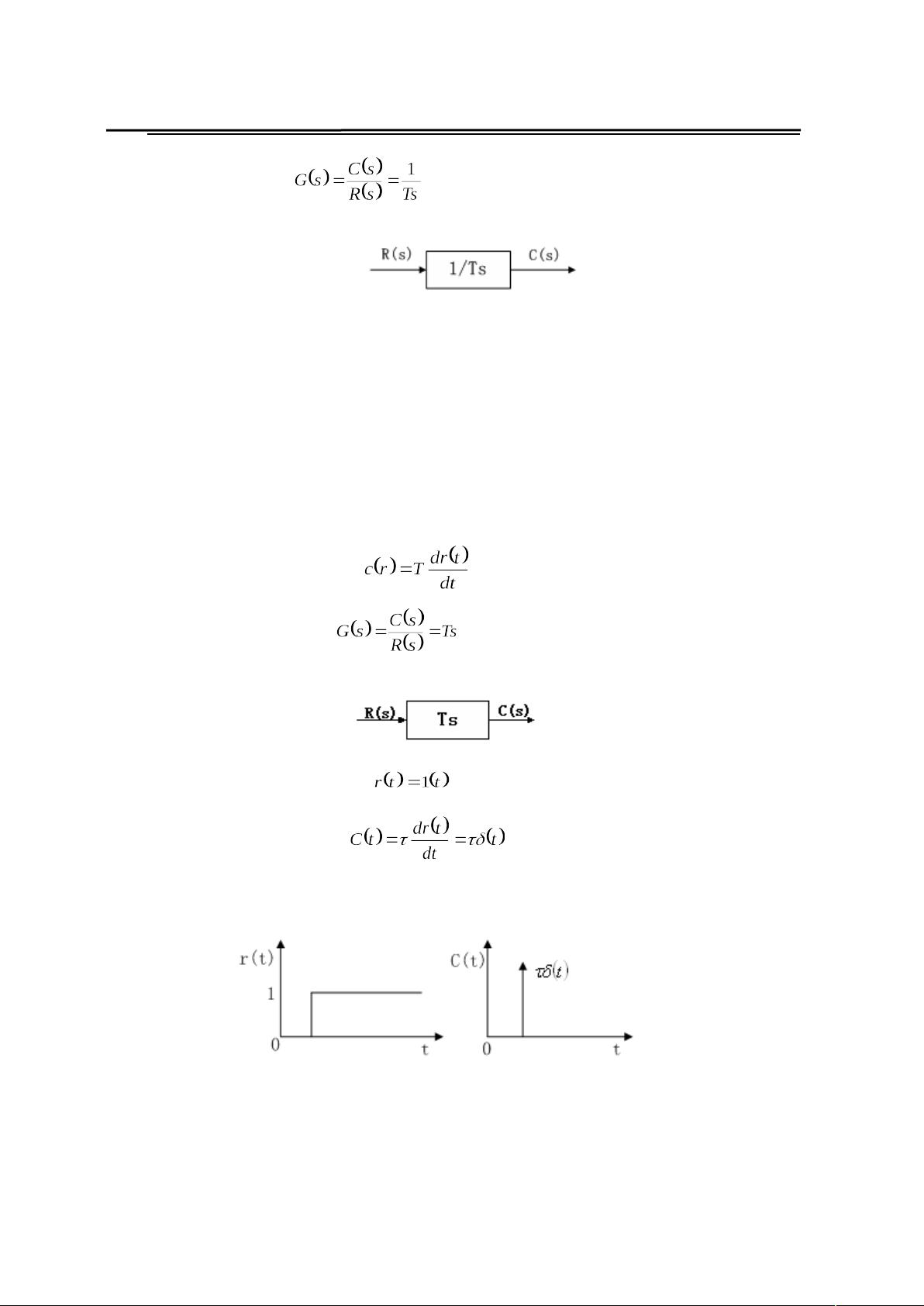
其中积分环节的方框图如图1.4所示
图 1.4 积分环节方框图
积分环节的特点是,输出量与输入量对时间的积分成正比。若输入突变,输出值
要等时间T之后才等于输入值,故有滞后作用。输出积累一段时间后,即使使输入为
零,输出也将保持原值不变,即具有记忆功能。只有当输入反向时,输出才反向积分
而下降。常利用积分环节来改善系统的稳态性能。
1.4.3 微分环节
理想的微分环节的微分方程为
(1.5)
其中T为微分时间常数。
对微分方程取拉氏变换后,可求得传递函数
(1.6)
理想的微分环节的方框图如图1.5所示
图 1.5 微分环节方框图
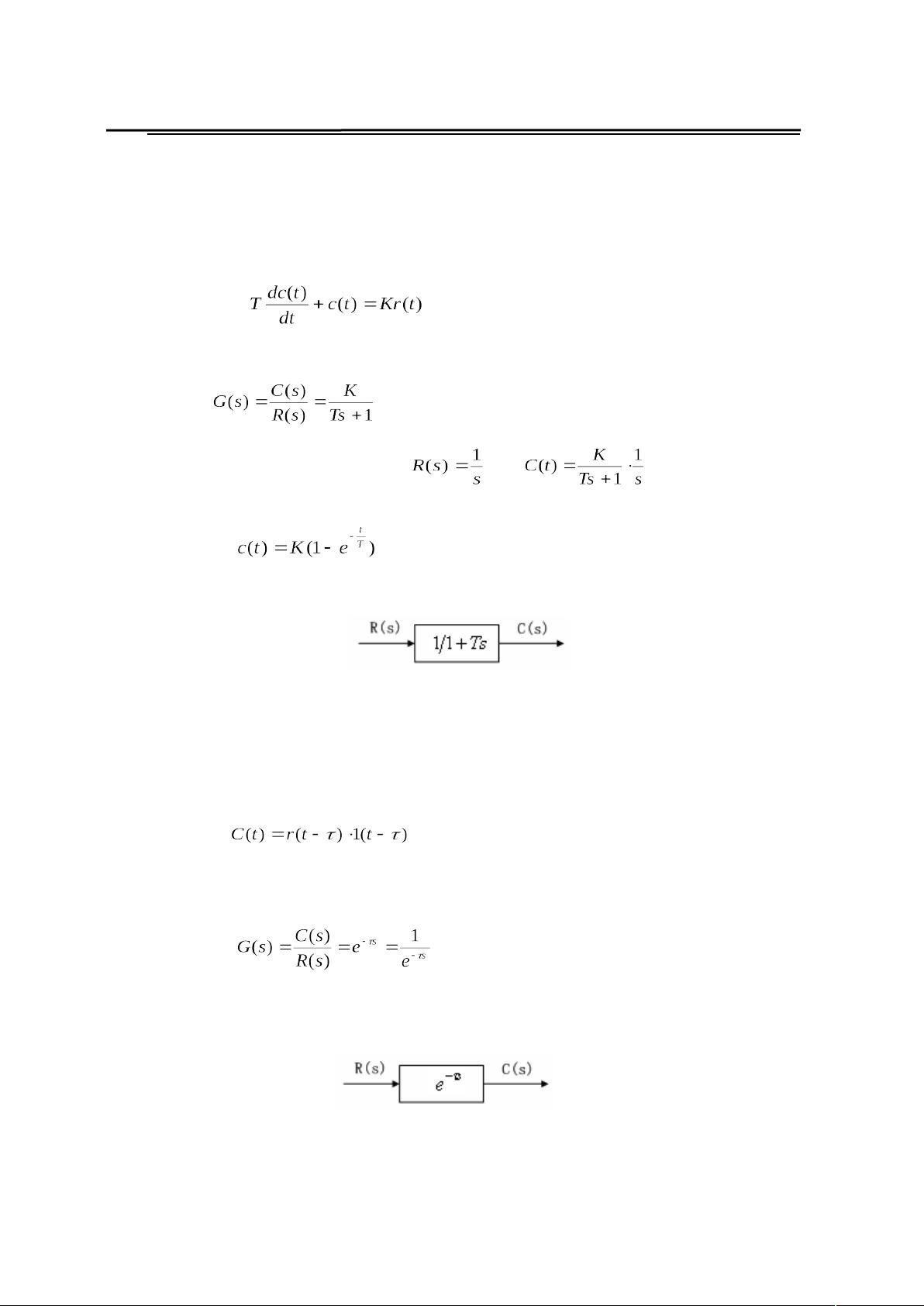
若输入为单位阶跃信号,即 ,则输出的单位阶跃响应为
(1.7)
这是一个面积为τ的脉冲,脉冲宽为零,幅值为无穷大,理想微分环节的输入和
输出如图1.6所示。
图 1.6 理想微分环节的单位阶跃响应
微分环节的特点是,其输出与输入信号对时间的微分成正比,即输出反映了输入
信号的变化率,而不反映输入量本身的大小。因此,可由微分环节的输出来反映输入
5
剩余42页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-09-24 上传
2022-07-15 上传
2022-07-14 上传
2022-04-21 上传
2024-06-21 上传

devin171715
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
