Linux内核中的Android Camera驱动解析
需积分: 46 104 浏览量
更新于2024-09-10
2
收藏 42KB DOC 举报
"Android-Camera驱动架构的学习笔记,涵盖了V4L2驱动以及Linux内核中的Camera驱动调用流程,特别是以USB摄像头为例的初始化过程。"
在Android系统中,Camera驱动架构是整个摄像头功能实现的基础,它涉及到硬件交互、内核层的驱动支持以及用户空间的应用接口。本笔记主要关注的是Linux内核层面的Camera驱动,特别是video4linux2(V4L2)框架。
V4L2是Linux内核中用于处理视频设备,包括摄像头在内的核心组件。它提供了一个通用接口,使得应用程序能够与视频设备进行交互,但并不直接处理APP的系统调用,如open和ioctl。V4L2驱动的视频设备通常在/dev/videoX下作为字符设备存在,主设备号为81,次设备号范围从0到63,用于不同类型的视频设备。
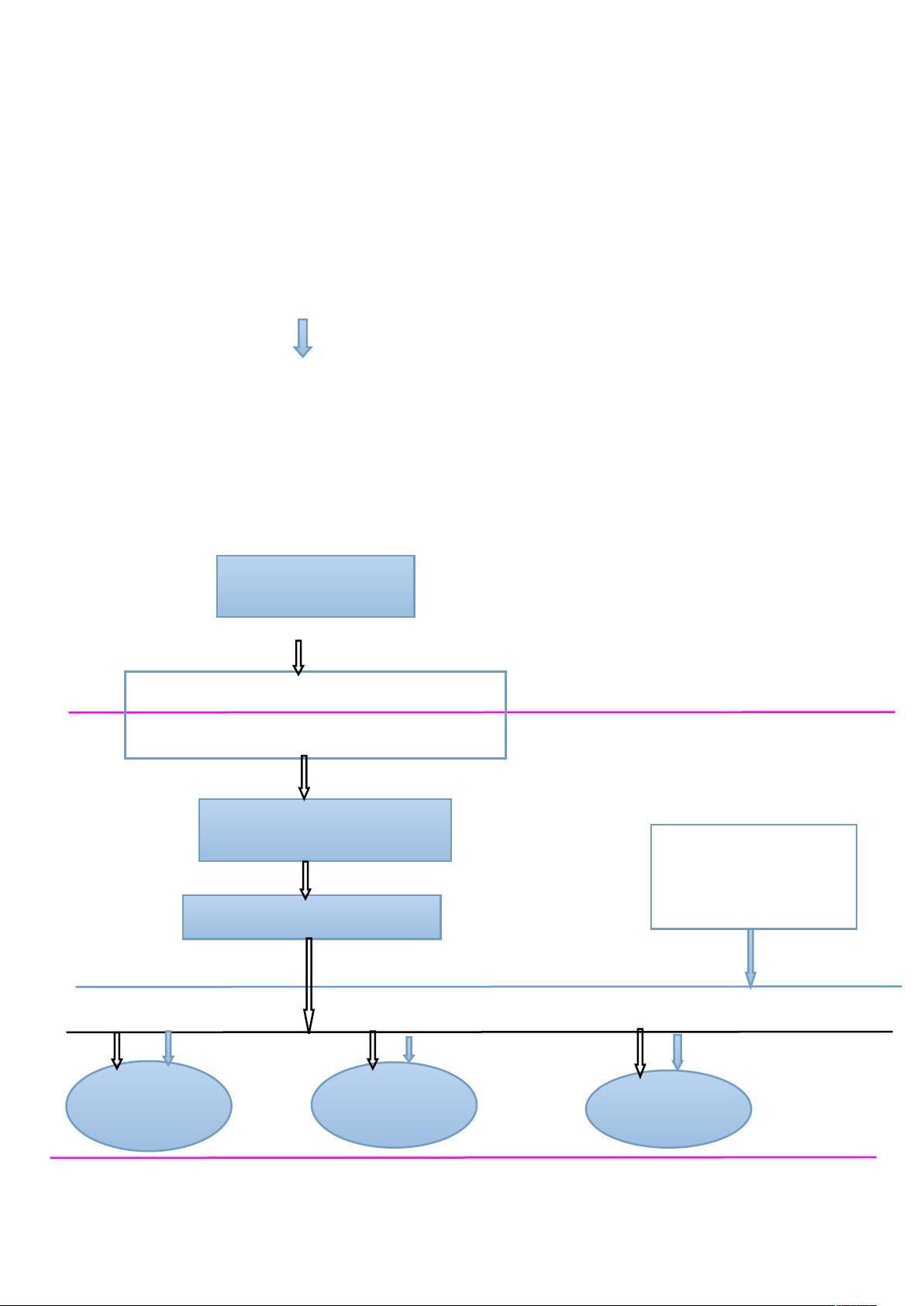
在系统调用流程中,Camera驱动架构可以分为三个层次:底层直接与硬件交互,通常是通过总线驱动如USB、I2C或PCI;中间层是V4L2,它提供标准的调用接口并被纳入内核驱动树;顶层是字符设备驱动层,与特定芯片厂商相关,创建了在文件系统中可被应用程序open调用的字符设备。
以USB摄像头为例,初始化过程如下:
1. 在`uvc_init()`函数中,UVC(USB Video Class)驱动通过`usb_register(&uvc_driver.driver)`注册到USB总线。
2. 当USB设备插入时,总线驱动会识别到设备并调用预设的回调函数`uvc_probe()`。
3. `uvc_probe()`进一步负责设备的初始化,包括设置参数、配置硬件等。
这一过程展示了Camera驱动如何在Linux内核中响应硬件事件,并建立与设备的连接,从而使得用户空间的应用可以通过标准接口访问和控制摄像头。
在Android系统中,Camera服务利用这些底层驱动提供的能力,通过HAL(硬件抽象层)与上层的Camera应用框架交互,提供给应用程序一个统一的API。HAL封装了与硬件相关的细节,使得开发者无需关心底层驱动的具体实现,只需关注应用程序的功能实现。
在深入理解Android Camera驱动架构的过程中,还需要熟悉Android的HAL机制、Camera服务的工作流程以及用户空间的Camera API。这包括设置捕获参数、控制曝光、对焦等功能的调用方式,以及如何处理捕获的图像数据。同时,对于CSI(Camera Sensor Interface)摄像头,其驱动架构可能有所不同,通常涉及MIPI CSI-2等接口,但基本原理与USB摄像头类似,都是通过V4L2或者其他内核驱动与用户空间通信。
总结来说,Android的Camera驱动架构是多层的,从硬件接口到用户接口,每一层都扮演着关键角色,确保了Android设备能够高效、稳定地使用各种类型的摄像头。学习和理解这一架构对于进行Android Camera功能的开发和优化至关重要。
Cameraqu 驱动架构
【摘要】所谓 驱动,包括我们目前项目中所使用的 摄像头和
摄像头的设备驱动。
【关键字】,
一、简述
在 内核中,是 内核中关于
设备的中间驱动层,向上为 应用程序访问视频设备提供了通
用接口,这里要注意的是 并不是直接与 打交道,也就是 调
用的 、 ! 等函数并不直接调用这个 层。向下为 中设备
驱动程序开发提供了统一的 框架。在 系统中, 驱动的视
频设备(如摄像头、图像采集卡)节点路径通常为" 中的
#, 驱动对用户空间提供“字符设备”的形式,主设备号为 $,对
于视频设备,其次设备号为 %&。除此之外,次设备号为 &%' 的
( 设备,次设备号为 )% 的是 *!! 设备+次设备号为 %
,, 的是 - 设备。由 驱动的 设备在用户空间通过各种 !
调用进行控制,并且可以使用 进行内存映射。
APP(SDK/android)
/dev/videoX /dev/radioX /dev/dibX
主设备号、次设备号
字符设备驱动层
本项目主
要 使 用 的 是 : ."
/,&
驱动层
UVC(USB
Video
Class)
OV5640.c
其它
.- 总线, 总线,
或者其它的驱动总线
模块
内核层
层
下载后可阅读完整内容,剩余4页未读,立即下载
274 浏览量
680 浏览量
142 浏览量
101 浏览量
141 浏览量
260 浏览量

luoxinghua
- 粉丝: 7
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- Marlin-1.0.x.zip
- 基于51单片机的出租车计价器.zip
- eSvin-开源
- 做一个真正的营业部团队经营者
- 2898096_fenkuai_image(OK).rar
- RedTeamCheatsheet:红色分组操作或CTF中使用的所有常用命令。 这是一项正在进行的工作,将随着时间的推移而更新
- TODO-List-Assignment:我已经为todo清单创建了一个任务,
- ece-开源
- mg
- 色谱模型参数优化器(EDM,LI):App查找适合最佳实验数据的EDM(线性等温线)模型参数。-matlab开发
- ignition-code-editor:将内联代码编辑添加到点火页面
- 为团队高留存而奋斗
- 翻译应用:翻译应用
- 和其mysql备份 v1.1
- packr:打包您的JAR,资产和JVM,以在Windows,Linux和Mac OS X上分发
- gtest.zip框架
