Matlab摄像机标定工具箱详解与使用
版权申诉
DOCX格式 | 1.27MB |
更新于2024-06-29
| 23 浏览量 | 举报
"该资源是关于Matlab摄像机标定工具箱的使用说明,包括工具箱的下载、安装方法以及图像采集的要求。内容涉及到摄像机标定的内参数模型和畸变模型,以及操作界面的介绍。"
Matlab摄像机标定工具箱是一款用于摄像机校准的实用软件包,它可以帮助用户纠正图像中的几何畸变,提高图像质量和准确性。在进行计算机视觉、自动驾驶或机器人定位等应用时,摄像机标定是必不可少的步骤。
1. 工具箱下载与安装
下载toolbox_calib.zip文件,解压后将toolbox_calib目录复制到Matlab的工作目录下,确保Matlab能够找到这个工具箱。为了进行标定,需要采集一系列已知几何形状(通常为棋盘格)的图像,并按照特定的命名规则(基本名加编号)保存到工具箱目录。
2. 标定模型
工具箱使用了Brown畸变模型来描述摄像机的内参数,模型包括焦距、主点坐标、径向畸变和切向畸变等参数。式(1-1)和式(1-2)分别表示未畸变和畸变后的像素坐标,其中k、k是焦距,s是x轴和y轴不垂直引起的耦合放大系数,(u0, v0)是主点坐标,k1、k2、k3是径向畸变系数,k1d、k2d、k3d是高阶径向畸变系数,k1、k2是切向畸变系数,r是成像点到摄像机原点的距离。
3. 操作界面
启动Matlab,将当前目录设置为包含标定工具箱的toolbox_calib目录,然后运行`calib_gui`指令,会弹出一个选择窗口。该窗口提供两种内存使用方式供用户选择,这可能会影响标定过程的效率和结果的精度。
通过这个工具箱,用户可以进行以下操作:
- 图像导入:导入采集的图像序列。
- 特征检测:自动检测图像中的棋盘格角点。
- 标定计算:基于检测到的特征点进行摄像机参数估计。
- 畸变矫正:利用计算出的参数对图像进行矫正。
- 结果评估:查看标定结果,如重新投影误差等。
使用Matlab摄像机标定工具箱,用户可以系统地完成摄像机标定过程,为后续的图像处理和分析任务提供准确的摄像机模型。对于计算机视觉研究人员和工程师来说,这是一个非常有价值的工具。
Matlab 摄像机标定工具箱的使用说明
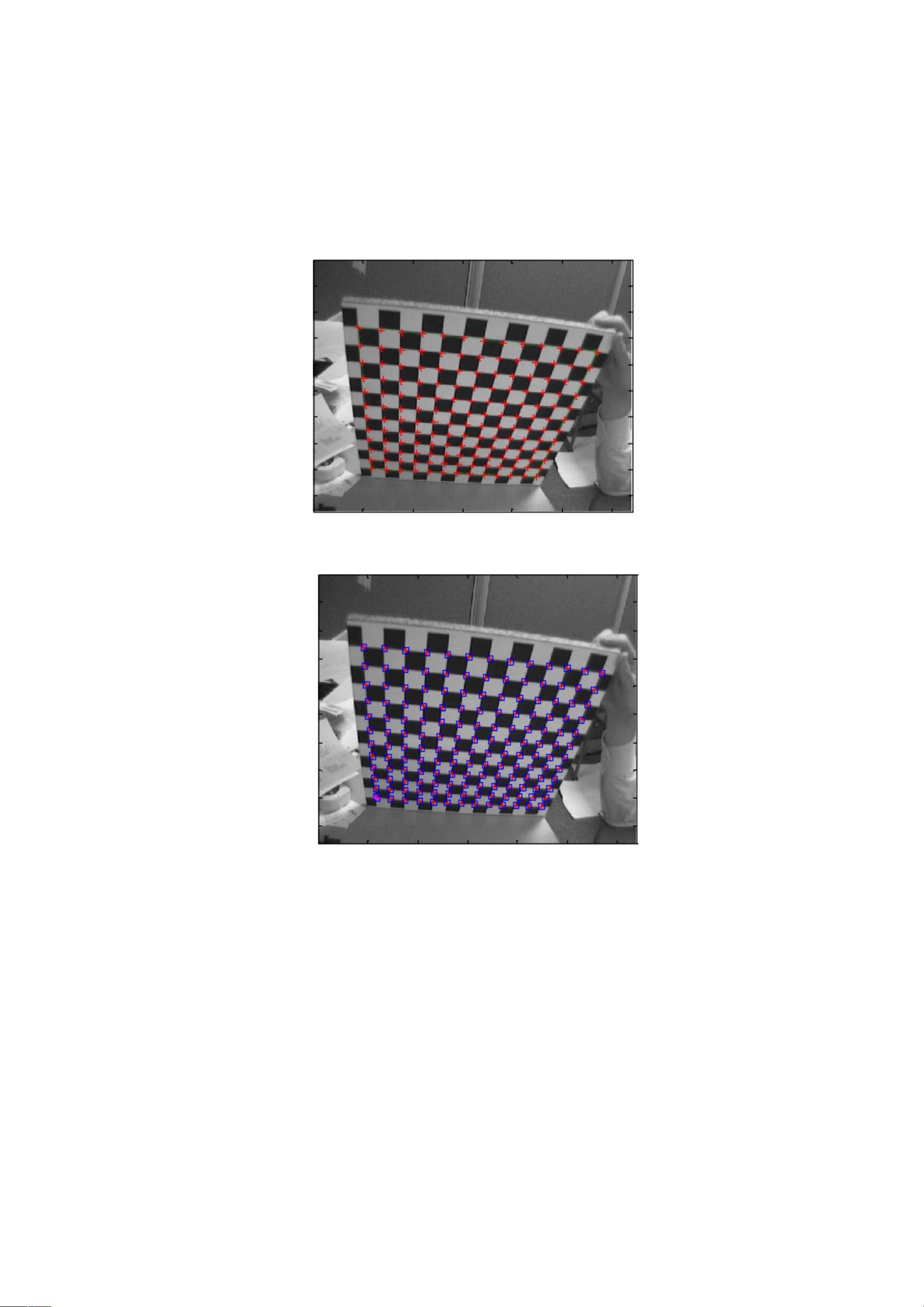
近 ;图 4(b)中的每个角点提取区域窗口包含了角点,表示角点提取结果的十字标记位置及角
点位置具有很好的吻合度。同样在m=5,n=5 时,未输入畸变初始值,但通过鼠标点击设定
棋盘格靶标的选定区域时,所形成的四边形的边及棋盘格靶标的网格线成较大夹角,此时图
像 Image1 的角点提取结果如图 5 所示。从图 5 中可以发现,图 5(a)中的十字标记位置及角
点具有明显偏差,部分十字标记远离角点;图 5(b)中的很多角点提取区域窗口没有包含角点,
表示角点提取结果的十字标记位置并不在角点位置,说明角点提取存在错误。
The red crosses should be close to the image corners
50
100
150
200
Y
250
300
350
400
450
O
X
100
200
300
400
500
600
(a)
Extracted corners
50
100
150
200
250
300
350
400
450
)
e
m
a
r
f
a
r
e
m
a
c
n
i
(
c
Y
dX
100
200
300
400
500
600
Xc (in camera frame)
(b)
图 4 合适的靶标选定区域及角点提取结果,(a) 靶标选定区域,(b) 角点提取结果
(3) 内参数标定
对用于标定的每一幅靶标图像进行角点提取后,在图 2 所示的标定工具箱操作面板点击
“Calibration”键,即可完成摄像机的内参数标定。
内参数标定时,Matlab 工具箱首先进行初始化,即将图像中心点坐标作为主点坐标的
初始值,采用平面靶标网格的消失点估计出摄像机的内参数作为内参数的初始值,畸变初始
值设为 0。镜头畸变采用包括径向畸变和切向畸变的Brown 畸变模型,并假设 6 阶径向畸变
系数 kc(5)=0。假设摄像机的 x 轴及 y 轴严格垂直,即图像坐标(u, v)及归一化成像平面内的
成像点坐标(x , y )解耦,k =0,内参数采用 4 参数模型。数组 est_dist(1:5)是畸变系数 kc(1:5)
c1 c1
s
是否标定的标志,只对标志取值为 1 的畸变系数标定,标志取值为 0 的畸变系数不标定。
4 / 174 / 17
剩余16页未读,继续阅读
相关推荐






春哥111
- 粉丝: 1w+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 华视CVR-100V证件扫描仪驱动v6.30发布
- 深入解析孙卫琴的Hibernate Netstore源码
- 毛笔制作仿动物毛工艺技术详解
- Python实现2020年Advent of Code编程挑战解析
- Winform界面设计教程:动态效果实现与UI指南
- 提高造纸脱水效率的创新装置设计
- 开源PHP程序IDV Directory Viewer:定制化浏览目录
- 深入理解Mahout的Item-based协同过滤技术应用
- 新型墙体模板支撑装置的设计文档
- 掌握Redux:基础到高级实践的完整工作坊
- Oracle RAC集群核心技术详解与实践指南
- HTML5 Canvas综合应用详解
- 数字化城市管理中的车辆监控系统设计
- C++17扩展向量工具:提升集合处理能力
- PHP编程语言的优势:全球互联网公司的首选
- 数学教学测量装置的设计与应用
