机器人实训教程:从基础到项目设计
版权申诉
76 浏览量
更新于2024-06-23
收藏 8.91MB DOC 举报
"机器人实训指导书.doc"
这本《机器人实训指导书》是为学习和实践机器人技术的学生或爱好者提供的一份详尽指南。它涵盖了从基础理论到实际操作的多个方面,旨在帮助读者理解机器人技术的基本原理,并通过实践提升技能。
在第一章"机器人概述"中,介绍了机器人的起源、发展历程及其广泛应用领域。MT-UROBOT作为本书中的实例,其内部结构被详细解析,包括结构简图、控制按键部分的功能,如开关按钮、电源和充电指示灯、下载口、复位/MTOS按钮以及运行键等,这些都为后续的实际操作提供了基础。
第二章"编制程序"着重讲解如何赋予机器人智慧。通过流程图程序,学习者可以掌握如何编写控制机器人走直线、转弯、播放音乐等基本动作的代码。同时,通过参与规则轨迹行走(如走正方形、拔河比赛)的项目,提高编程和逻辑思维能力。
第三章"利用传感器设计机器人项目",主要探讨如何结合不同类型的传感器如麦克风、红外和遥控传感器进行项目设计。通过任务分析、准备活动、方案设计、编制程序和运行调试等一系列步骤,学习者将深入了解传感器在机器人中的实际应用。
第四章"机器人项目系统训练"包含了一系列高级实践课题,如机器人速度控制、自主避开障碍、寻迹、趋光行为、无线通信、声控以及跟人走等。这些项目旨在提升学习者的综合技能,使他们能解决更复杂的问题。
第五章"让学生独立设计项目"鼓励学习者运用所学知识,参与机器人灭火等各类竞赛,以实战形式检验和提升他们的设计和编程能力。
这本书不仅提供了丰富的理论知识,更强调实践操作,是一本全面且实用的机器人实训教材,适合初学者和有一定基础的学习者深入探索机器人技术。通过学习,读者不仅可以了解机器人的基本构造和工作原理,还能掌握编程和项目设计的技能,为未来的机器人开发和应用打下坚实基础。

在 MT-UROBOT 机器人里有码盘和光耦(光电编码器)。光电编码器主要作为控制
的反馈信号。光耦通过测定随轮轴一起转动的码盘的转动角度,得出轮子所转动的圈
数,从而测定距离。实物如图 1-7 所示。
地面灰度传感器
地面灰度传感器也叫寻迹传感器,它由一个红外光发射管和一个红外接受管组成,
由于地面的灰度不同,经过反射,接收管接收到的信号也会发生相应的变化,从而可
以得到地面上灰度的信息。
金属接近开关
金属接近开关为一种反射式接近传感器,可以探测到一定距离内的金属物体。
其他传感器
大学版机器人还能集成很多其他的传感器,插在 MTBus 上即可使用。下面作简
单介绍。
热释电传感器
热释电传感器对移动的人体热源敏感,可以探测几米外的人体。大学版机器人
装上 1 个或几个热释电传感器后,你可以让他一看见你,就向你迎过来,让他跟着你
走。
超声传感器
超声传感器是机器人测距的专业传感器,测量距离一般为 20cm-6m,测量精度为 1%,
是测量声波发射与收到回波之间的时间差来测量距离的。运用大学版机器人本体上带
的传感器在房间里找到门不容易,但运用声纳对房间扫描一周后,就能较方便找到房
门。
数字指南针
自主机器人的导航至今仍是世界性难题,借助数字指南针,可以使大学版机器人
辨别方向。
温度传感器
想让机器人动态告诉你气温吗?加一个温度传感器是个好方法。
无线视觉传感器
用大学版智能机器人来作移动的监视平台。你可以在大学版机器人上安装无线摄
像头,把视频信号发射出来,用 PC 机接收后进行图象处理。
第 2 章 编 制 程 序
图形化交互式 C 语言(简称流程图)是用于 MT-UROBOT 的专用开发系统。流程图
编辑环境运行在 Windows 95/98 和 Windows NT 4.0 以上版本的操作系统上。流程图
是由图形化编程界面和 C 语言代码编程界面组成的。
双击桌面上的流程图图标,进入流程图程序编程界面(如图 2-1)可以看到流程
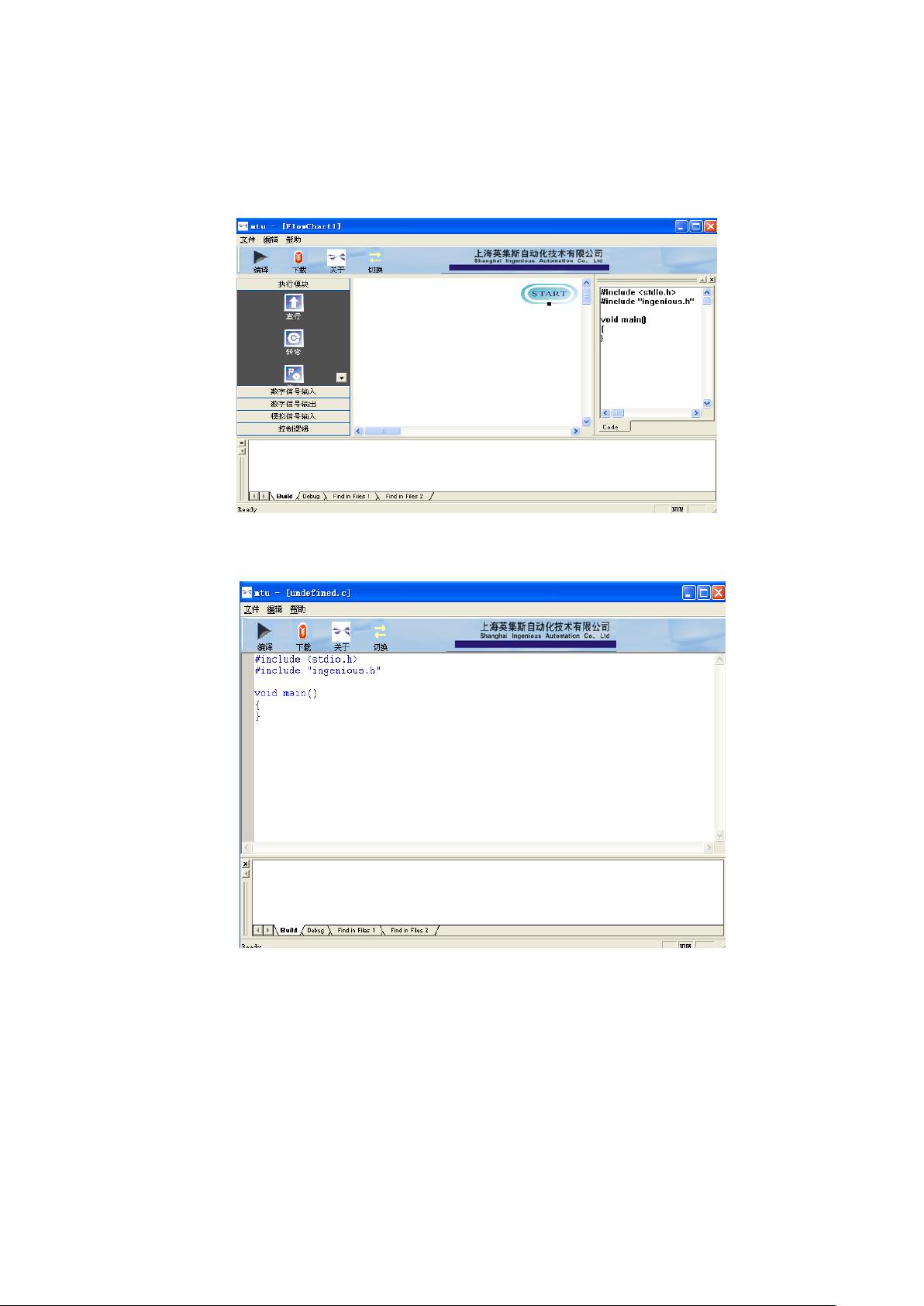
剩余40页未读,继续阅读
2023-03-03 上传
C2000,28335Matlab Simulink代码生成技术,处理器在环,里面有电力电子常用的GPIO,PWM,ADC,DMA,定时器中断等各种电力电子工程师常用的模块儿,只需要有想法剩下的全部自
1308 浏览量
2025-01-04 上传









