模型预测控制(MPC)实操:预见与适应性的工作计划策略
需积分: 0 22 浏览量
更新于2024-08-04
收藏 382KB DOCX 举报
模型预测控制(Model Predictive Control, MPC)是一种基于动态模型的控制策略,它在许多领域中得到广泛应用,特别是在工业自动化、机器人控制和能源管理中。在本文中,我们将探讨MPC的一个简单实现及其背后的原理。
1. **离散化预测模型**:
为了将连续系统的控制问题转化为离散形式,预测模型通常通过前向欧拉法进行离散化,这个过程将系统的状态方程转化为一系列离散状态更新公式,每个状态在控制周期 \( T \) 的间隔内由当前状态和输入决定。
2. **预测性特点**:
MPC的核心在于其前瞻性的规划能力。与PID控制器不同,MPC会预估未来若干个时间步的系统状态,通常称为预测步数 \( p \),这使得控制器能够考虑到未来的影响,从而制定更为合理的控制决策。预测阶段利用了系统的动态模型,模拟出系统的行为,以优化长期性能。
3. **工作计划与控制流程**:
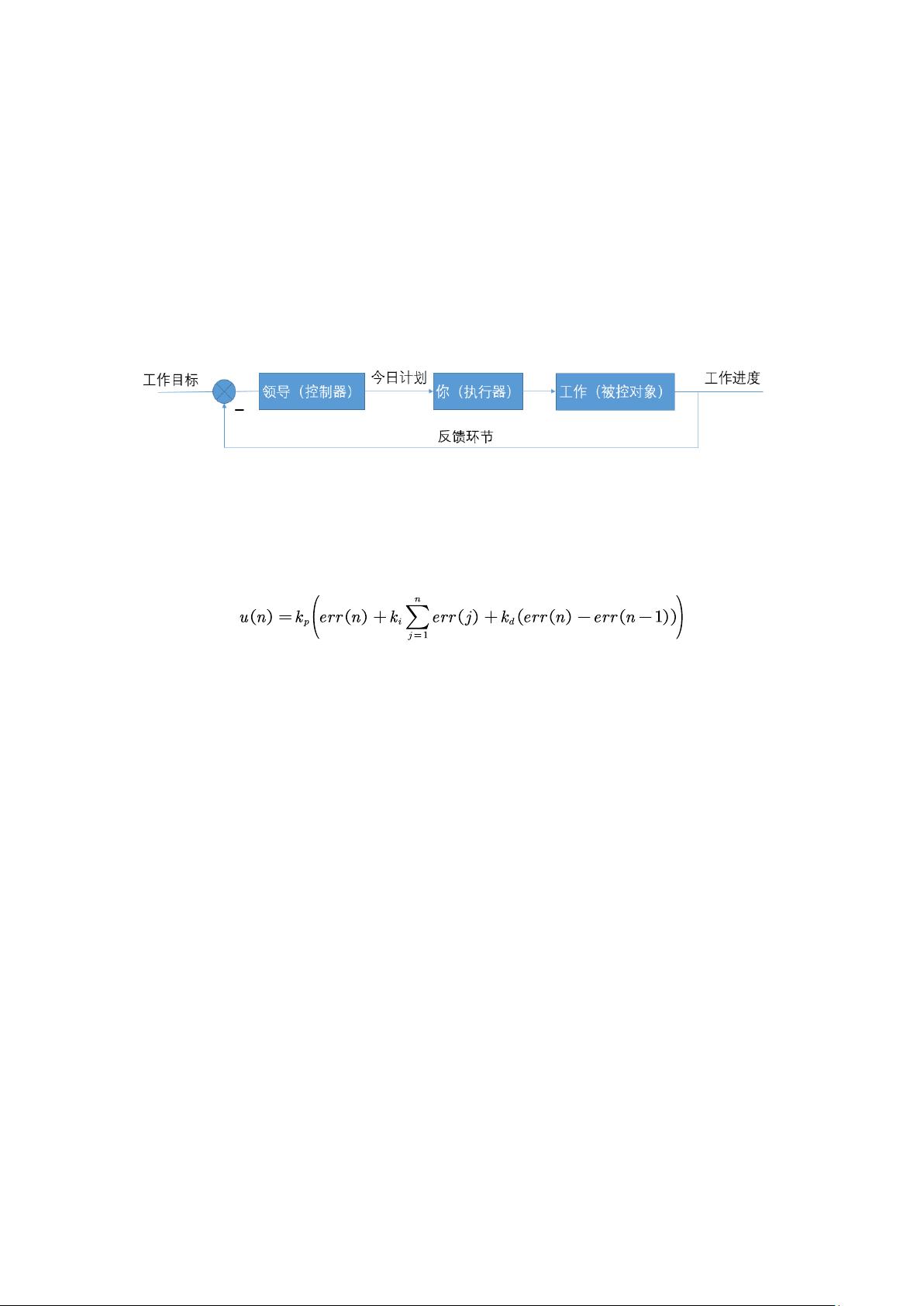
文中通过日常生活中的例子,形象地比喻了MPC与闭环控制的关系。领导者(控制器)根据员工的工作进度(当前状态)、目标(参考值)以及员工能力(系统模型)来制定长期的工作计划。尽管如此,领导者仅提供短期计划(控制时域),并销毁后续的计划,以便实时调整。这种方法体现了MPC的滚动优化策略,即在每次控制周期结束时,只执行第一个优化后的控制决策,并更新预测模型。
4. **控制时域与预测时域**:
控制时域指的是实际执行计划的时间长度,如领导给出的五天计划;而预测时域则是领导考虑的未来展望期,如预期的十天进度。通过合理设定这两个参数,可以平衡控制的灵活性与效率,避免过度规划导致资源浪费。
5. **模型预测控制的优势**:
MPC的优势在于它的预见性和适应性。它能够更好地处理不确定性,通过模型预测克服PID的“前瞻性”不足,并且可以根据实时数据调整控制策略,提高了系统的稳定性和性能。
模型预测控制是一种利用系统模型对未来进行预测和优化的控制方法,通过结合离散化、预测和滚动优化,使得控制决策更加智能和灵活。与传统的PID控制相比,MPC在复杂系统中展现了显著的优势,但同时也需要权衡计算成本和实时性的问题。在实际应用中,根据系统的特性和需求,选择合适的控制时域和预测时域,是MPC成功的关键。
一个模型预测控制(MPC)的简单实现
1 生活中的启示
情景如下:你们团队每天早晨开一次例会,主要会议内容是你汇报工作进度,领导根据
工作目标和工作进度,制定当天的工作计划,你领到工作计划后开始工作。每天都这样周而
复始,从领导的角度看,这件工作实现了“闭环”,工作进度“可控”,这就是闭环控制系统。
图 1 闭环控制系统
不同的领导(控制器)水平有高又低,按照介绍控制器先踩一脚 PID 的国际惯例,设:
err = 工作目标-工作进度
u = 今日工作计划
则 PID 控制器的控制律为:
从该控制律中我们可以看到 PID 的两个问题:
1, PID 控制器不具有“前瞻性”:参与计算的各个量,有当前的 err,上个控制周期的 err,以
及之前所有的 err 累计和,偏偏没有未来的 err。这个“领导”目光过于短浅,只求今天
能完成任务,哪怕第二天公司就倒闭了,那也是第二天要解决的麻烦,今天该干啥干
啥。
2, PID 属于无模型控制。作为一个“领导”,PID 仅仅通过工作目标和工作进度上的差距,以
及三个近乎魔法般的数字,就制定了工作计划,完全不考虑你的工作能力和这项工作
的难度,这是非常失职的。
为了提高工作的的可行性,经过思考,我们还可以有另一种方案:
领导听完你的汇报后,根据工作进度(系统状态)、工作目标(参考值)、你的工作能
力和任务难度(系统模型),制定了未来 10 天的工作计划,每一天要干什么都写得清
清楚楚明明白白。
领导将这十天计划里面第一天的计划交给你,剩下九天的计划销毁。
第二天重复上述过程。
显然第二种方案更具有可行性,它能根据任务的完成情况及时调整工作计划,同时兼
顾了未来的工作计划、你的工作能力和任务的难度,更符合我们的认知。
当然这种方案还有一点小缺陷,比如“剩下九天计划销毁”,领导看了这个方案肯定心里
不舒服,辛辛苦苦做的计划凭什么销毁呢?为了弥补这个缺陷,我们提出了“控制时域”和
“预测时域”的概念。控制时域是指领导做多少天的计划,预测时域是指领导思考多长远的
进度。比如,领导考虑到计划跟不上变化,想太长远没意义,就先做了五天的计划(控制
下载后可阅读完整内容,剩余5页未读,立即下载
15101 浏览量
2024-11-06 上传
2023-05-06 上传
153 浏览量
2024-05-20 上传
2023-07-31 上传
2024-07-10 上传
点击了解资源详情
点击了解资源详情

仙夜子
- 粉丝: 45
- 资源: 325
 我的内容管理
展开
我的内容管理
展开







最新资源
- attention
- worker-manager:您是否希望执行长时间运行的任务而又不会阻塞您的主要流程?
- ipmail-开源
- URP Shadow Receicer Shader
- systemjs-mocha-spike:SystemJS Mocha Spike
- 兄弟姐妹重布线:波哥大大学(Proyecto de la lagogo)毕业于JoséManuelGalán和Virginia Ahedo。 铝制耐火材料生产商协会,墨西哥铝业联合公司
- pity-calc:找出Genshin Impact可惜的计算器
- watershed.zip
- Memo-code-snippets-and-notes:杂项代码段和注释
- springboot075基于SpringBoot的电影评论网站系统(开题报告+论文)
- TogglWeekByTag:用于按标签进行 Toggl 每周报告的 Chrome 扩展
- C#快速学习笔记.rar
- proyecto_m17
- poc-bradesco:我旁边的Pruebas de aplicacion
- 保险行业培训资料:少儿险主打产品介绍
- 项目案例-班级管理系统
