自动控制原理与设计课后答案解析 - 动态模型与问题解答
"自动控制原理与设计[李中华译]课后答案,涵盖了动态模型、问题及解决方案,涉及机械系统动力学模型的建立以及摆动系统的运动方程。"
自动控制原理是研究如何使系统自动地按照预定的方式运行的一门学科,而《自动控制原理与设计》是该领域的重要教材之一。第五版由李中华翻译,提供了丰富的实例和课后习题以帮助学生深入理解自动控制的基础理论和应用。
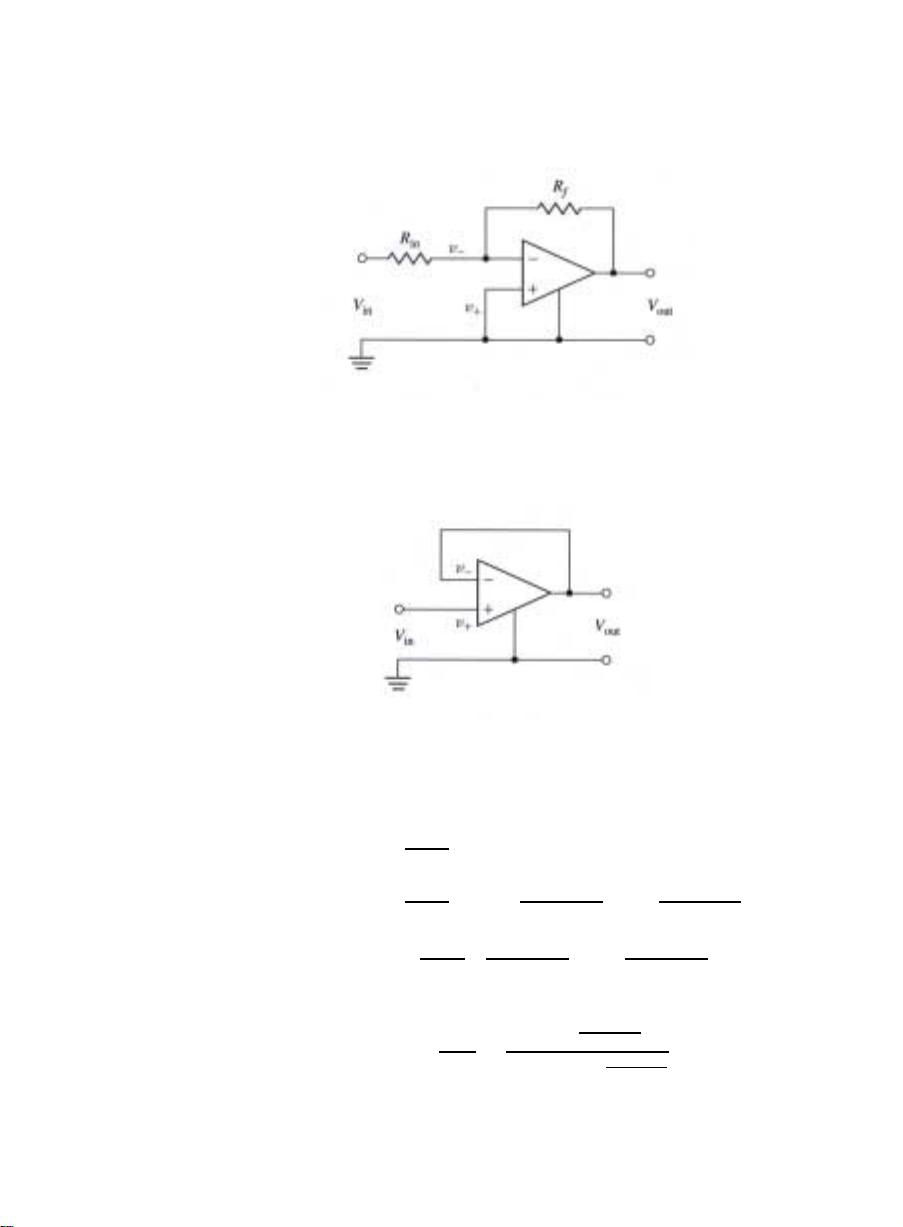
动态模型是自动控制系统分析和设计的核心部分,它描述了系统在不同输入和扰动下的动态响应。在第2章中,主要探讨的是机械系统的动力学建模。例如,问题1要求根据图2.38所示的机械系统,写出相应的微分方程。解题的关键在于绘制自由体图(Free Body Diagram, FBD),通过分析物体受到的各种力(如弹簧力、阻尼力)的方向来确定它们对物体运动的影响。题目给出的例子包括两个质量块(m1和m2)以及多个弹簧和阻尼器,解题时需要分别写出每个质量块的加速度与其所受力之间的关系。
对于问题2,涉及了一个简谐摆的运动方程。简谐摆是由一根细杆(质量为2kg)构成,其长度(l)决定了摆动周期。摆动周期(T)是指摆动一次所需的时间,通常与摆长有关。题目要求找到使得摆动周期恰好为2秒的杆的长度。解决这类问题通常需要利用小角度近似(sinθ≈θ)以及简谐振子的周期公式T = 2π√(l/g),其中g是重力加速度。通过这个公式,可以计算出理想长度的杆。
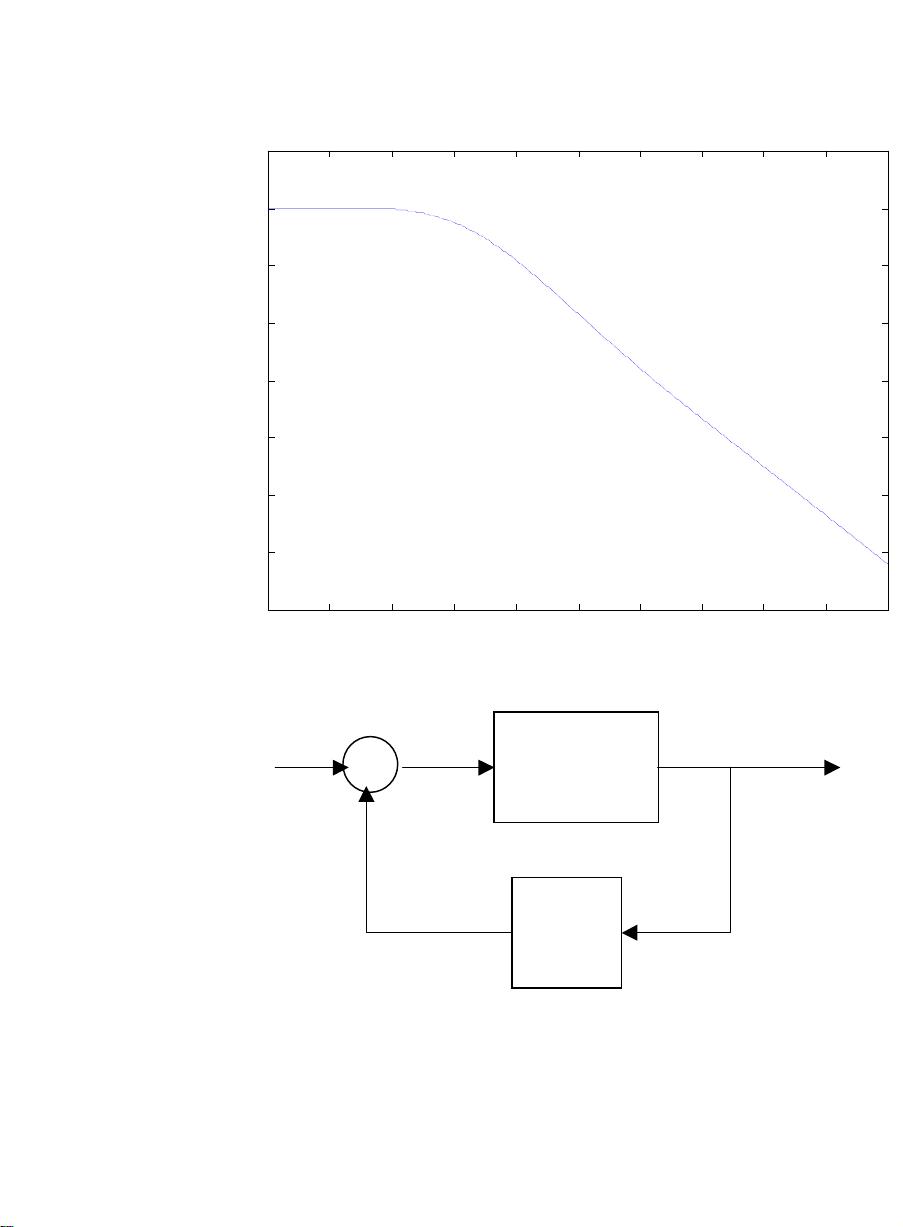
这些题目不仅有助于学习者掌握如何构建动态模型,还强调了物理直觉和数学表达的结合,这对于理解和设计自动控制系统至关重要。动态模型的建立是控制系统分析的基础,包括状态空间表示、传递函数和根轨迹等方法。而摆动系统则引入了非线性系统和振动控制的概念,这些在实际工程中有着广泛的应用,比如在飞行器稳定、机械臂控制以及精密仪器的设计等方面。
通过解答这些问题,学习者能够深化对系统动力学的理解,进一步掌握如何将这些概念应用于自动控制系统的分析和设计中。这不仅包括对经典控制理论的掌握,还有助于理解现代控制理论中的状态反馈、观测器设计和最优控制等高级主题。

26 CHAPTER 2. DYNAMIC MODELS
From Cramer’s Rule,
Y =
det
·
ms
2
+ bs + k 0
−(bs + k) U
¸
det
·
ms
2
+ bs + k −(bs + k)
−(bs + k) Ms
2
+ bs + k
¸
=
ms
2
+ bs + k
(ms
2
+ bs + k)(Ms
2
+ bs + k) − (bs + k)
2
U
Finally,
Y
U
=
ms
2
+ bs + k
(ms
2
+ bs + k)(Ms
2
+ bs + k) − (bs + k)
2
=
ms
2
+ bs + k
mMs
4
+(m + M)bs
3
+(M + m)ks
2
9. For the inverted pendulum, Eqs. (2.34),
(a) Try to put the equations of motion in to state-variable form using the
state vector x =[
θ
ú
θ x úx
]
T
. Why is it not possible?
(b) Write the equations in the “descriptor” form
E˙x = F
0
x + G
0
u,
and deÞne v alues for E, F
0
,andG
0
(note that E is a 4 × 4matrix).
Then show how you would compute F and G for the standard state-
variable description of the equations of motion.]
Solution:
(a) It is impossible because the acceleration terms are coupled.
(b)
1000
0 I + m
p
l
2
0 −m
p
l
0010
0 −m
p
l 0 m
t
+ m
p
ú
θ
¨
θ
úx
¨x
=
0100
m
p
gl 00 0
0001
000−b
θ
ú
θ
x
úx
+
0
0
0
1
u
E˙x = F
0
x + G
0
u
˙x = E
−1
F
0
x + E
−1
G
0
u
F = E
−1
F
0
, G = E
−1
G
0

剩余671页未读,继续阅读
130 浏览量
点击了解资源详情
135 浏览量
2010-12-01 上传
385 浏览量
288 浏览量
1007 浏览量
154 浏览量

choumingnwpu
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 谭浩强C语言教程全书Word版——学习C语言必备
- 实现jQuery+Struts+Ajax的无刷新分页技术
- Java语言构建史密斯社会结构模型分析
- Android开发必备:AndroidUnits工具类详解
- ENC28J60网卡驱动程序:完整源代码及测试
- 自定义窗口类创建及响应消息的实现方法
- 数据库系统设计与管理的权威指南
- 医院门诊管理系统的实现与运行教程
- 天涯人脉通讯录:高效软件注册机使用指南
- 使用A计权法测量声卡声压级的MATLAB程序
- remark-react-lowlight:实现React语法高亮的低光注释方案
- 智能化消毒柜的模糊控制技术研究
- 多功能商业金融机构企业网站模板与全栈技术项目源码
- RapidCopy:基于Qt5的GNULinux便携版FastCopy工具
- 深度解读严蔚敏数据结构(C语言版)电子书
- 张正友标定法详解及Matlab应用
