"C语言程序设计教程:指针、数组、函数及内存分配详解"
版权申诉
161 浏览量
更新于2024-03-06
收藏 915KB PPT 举报
本教程课件是关于C语言程序设计的教程,共包括19页内容。从指针和数组间的关系、数组的定义和元素访问、函数的定义、二维数组的元素访问、输出函数printf和puts、内存分配函数malloc、变量的作用域、指针的概念、指针与多维数组、全局变量、函数的概念、函数间传递指针与传递值、访问二维数组、多重循环控制、转义字符、函数间传递指针、传地址以及循环等多个方面介绍了C语言程序设计的知识点。通过学习本教程,学员可以对C语言程序设计有一个全面的了解,包括基本的语法知识、指针和数组的应用、函数的定义和调用等内容。同时,本教程还包括了一些习题,用以检验学员对所学知识的掌握情况,帮助学员巩固所学的知识。
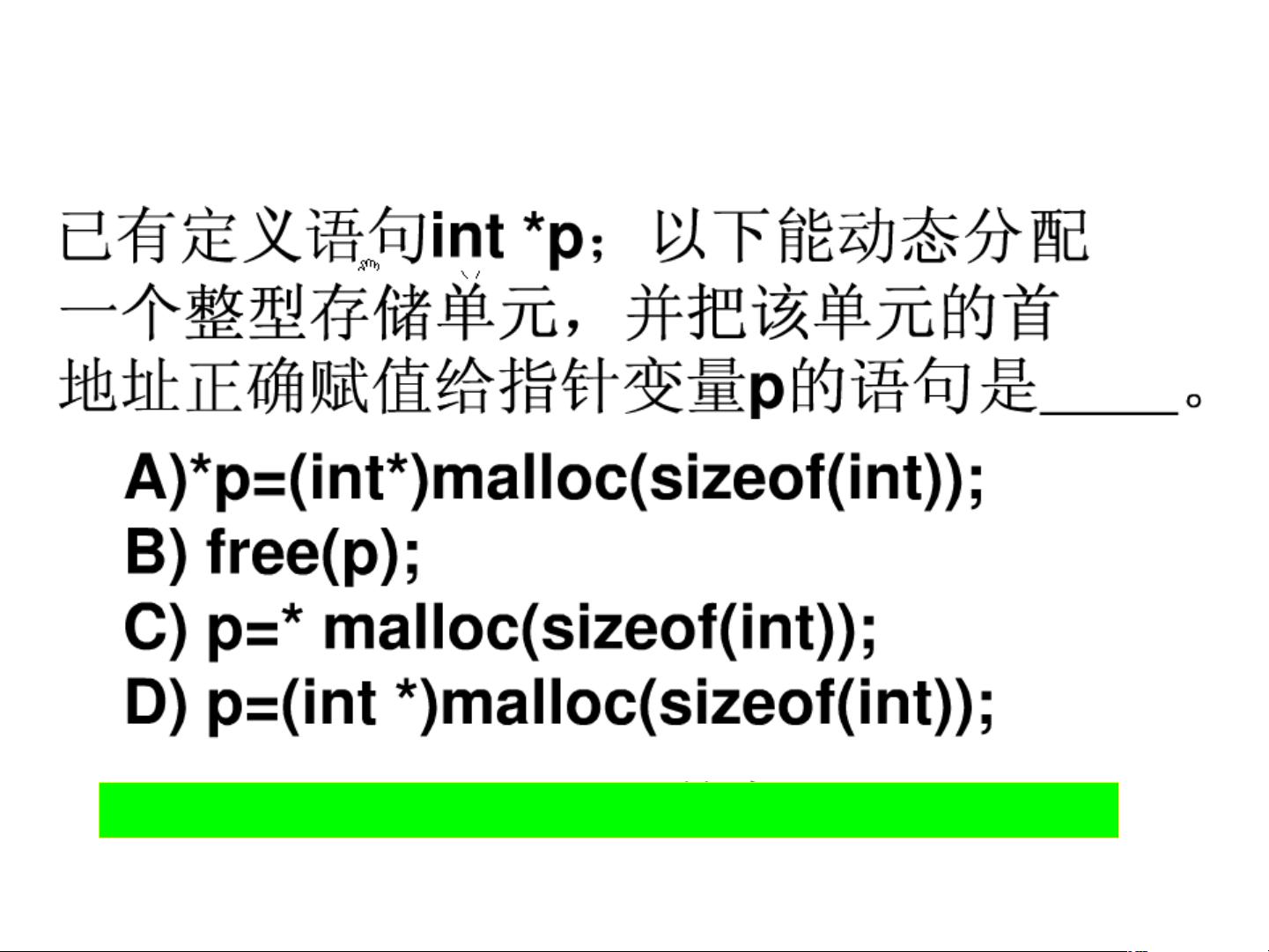
课件中的内容包括指针和数组的关系,数组的定义和元素的访问,函数的定义,二维数组的元素访问,输出函数printf和puts,内存分配函数malloc,变量的作用域,指针的概念,指针和多维数组之间的关系,全局变量,函数的概念,函数间传递指针和传递值,访问二维数组和多重循环控制,转义字符,函数间传递指针等内容。这些内容贯穿了C语言程序设计的方方面面,从基本的数据类型到更加复杂的数据结构都有介绍和讲解。
本教程的目的是帮助学员系统地了解C语言程序设计的相关知识,掌握其基本语法和重要概念,以及函数的应用、指针和数组的使用等内容。通过学习本教程,学员可以更好地应用C语言进行程序设计,提高编码水平,同时也为后续的学习和工作打下坚实的基础。
总的来说,本教程是一份全面介绍C语言程序设计的教程,内容丰富、知识点覆盖广泛。通过本教程的学习,学员可以系统地了解C语言程序设计的相关知识,掌握其基本语法和重要概念,提高编码水平,为后续的学习和工作打下坚实的基础。该教程还包括了一些习题,可以帮助学员巩固所学的知识,检验学习效果。希望学员能够认真学习本教程,掌握C语言程序设计所需的知识和技能,为未来的学习和工作打下坚实的基础。
第 6 页
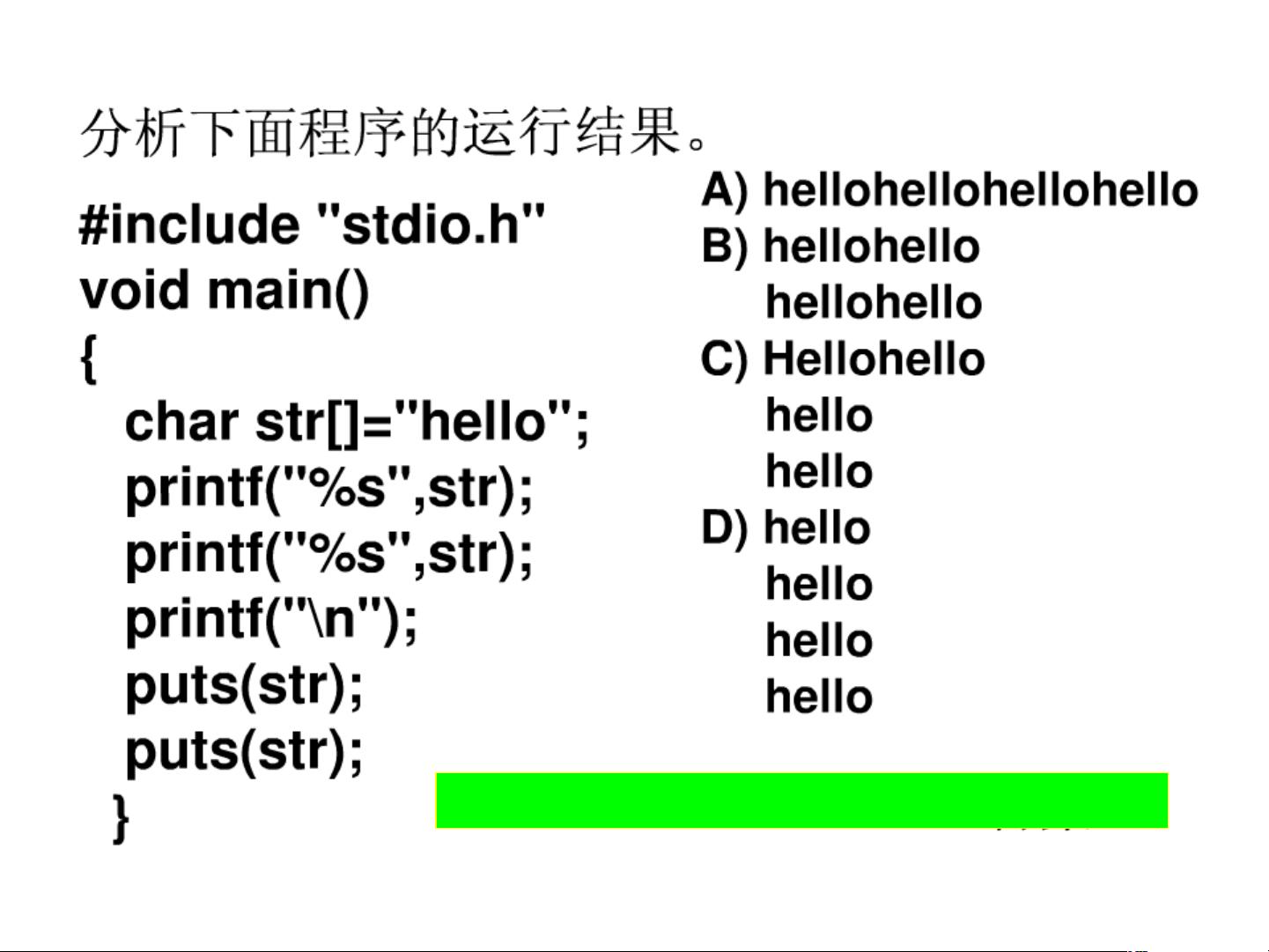
输出函数 prin 和 puts
剩余30页未读,继续阅读
2022-05-07 上传
2023-05-31 上传
173 浏览量
200 浏览量
125 浏览量
2023-06-13 上传
185 浏览量
470 浏览量

matlab大师
- 粉丝: 2798
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fall2019-group-20:GitHub Classroom创建的Fall2019-group-20
- cv-exercise:用于学习Web开发的仓库
- 雷赛 3ND583三相步进驱动器使用说明书.zip
- Rocket-Shoes-Context
- tsmc.13工艺 standardcell库pdk
- 回归应用
- 汇川—H2U系列PLC模拟量扩展卡用户手册.zip
- mysql-5.6.4-m7-winx64.zip
- PortfolioV2.0:作品集网站v2.0
- 线性代数(第二版)课件.zip
- 直线阵采用切比学夫加权控制主旁瓣搭建OFDM通信系统的框架的实验-综合文档
- quicktables:字典的超快速列表到Python 23的预格式化表转换库
- 彩色无纸记录仪|杭州无纸记录仪.zip
- DiagramDSL:方便的DSL构建图
- api.vue-spotify
- LLDebugTool:LLDebugTool是面向开发人员和测试人员的调试工具,可以帮助您在非xcode情况下分析和处理数据。
