Docker容器引擎:安装与存储驱动详解
需积分: 9 60 浏览量
更新于2024-07-09
收藏 1.73MB PDF 举报
"Docker学习笔记概述"
Docker是一款强大的开源应用容器引擎,它基于Linux内核的namespace和cgroup技术,实现了轻量级的虚拟化,使得应用程序可以在独立的环境中运行,而无需考虑底层系统的差异。Docker的核心是其镜像和容器的概念,通过镜像创建容器,容器则作为运行时的实例。
Docker支持三种主要的镜像存储驱动器,分别是aufs、devicemapper和btrfs,每种驱动都有其独特的优势和适用场景。
1. aufs(AnotherUnionFS):aufs是Docker早期支持的驱动,它是一种UnionFS,允许将多个目录合并为单一的虚拟文件系统。尽管aufs可能不会被正式纳入Linux内核,但因其对容器之间共享可执行文件和库的良好支持,对于运行大量具有相同代码或库的容器,aufs是理想的选项。
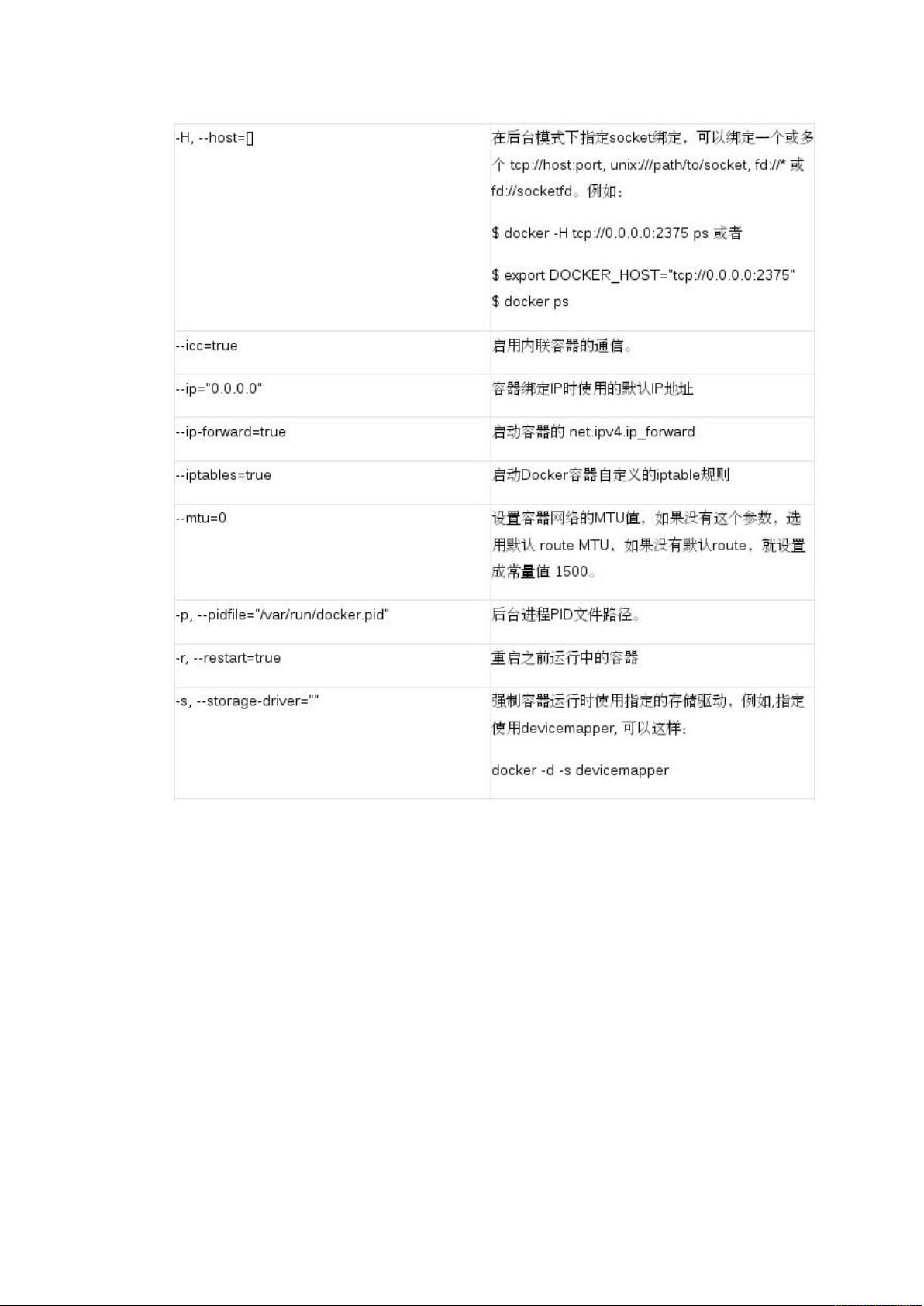
2. devicemapper:devicemapper是Linux内核中的一个设备映射框架,它允许用户自定义存储资源的管理策略。使用devicemapper驱动,Docker会在启动时创建一个包含镜像和容器的100G简单文件,并且每个容器的大小被限制在10G。如果需要调整这个限制,可以通过修改docker daemon的启动参数来实现。例如,使用`docker-daemon -s devicemapper`启动Docker服务。
3. btrfs:btrfs驱动在构建Docker镜像时表现出较高的效率。然而,与devicemapper类似,btrfs不支持在设备之间共享存储空间。这意味着,虽然在构建过程中速度快,但如果需要容器间共享数据,btrfs可能不是最佳选择。
选择哪种驱动取决于具体需求,例如性能、存储管理和资源限制等。在生产环境中,devicemapper经常被推荐用于其稳定性和资源管理能力,而aufs和btrfs则在某些特定场景下更有优势。
理解Docker的镜像存储驱动器对于优化Docker的使用和管理至关重要。正确选择和配置驱动器可以帮助提高容器的性能,节省存储空间,并确保应用程序的高效运行。在深入学习Docker时,了解这些基础知识是必要的,因为它们直接影响到Docker部署和维护的效率。
剩余53页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-05-19 上传










