多导弹分布式协同制导:固定与切换通信拓扑策略
69 浏览量
更新于2024-07-15
收藏 1.63MB PDF 举报
本文探讨了具有固定和切换定向通信拓扑的多枚导弹分布式团体协作制导(Distributed Group Cooperative Guidance, DGCG)的问题。与传统的针对单个目标的协同制导不同,DGCG适用于同时或顺序攻击多个目标的场景。在这样的群体协作攻击中,导弹系统被划分为多个子组,每个子组负责攻击其特定的目标。导弹在同属于一个子组时需要同时到达目标,而不同的子组则按照预定的时间顺序进行协作。
研究的焦点在于设计一种两步制导策略来实现这一目标。第一步采用基于局部信息的DGCG法则,导弹之间通过固定的定向通信网络进行协调,确保每个子组内的导弹形成协同动作。这一步涉及利用分布式控制理论,如网络优化和自适应控制算法,来处理多导弹系统中的复杂动态,并确保任务分配和路径规划的同步性。
第二步是切换定向通信拓扑,当不同的子组开始行动时,通信结构可能会根据需要改变。这种灵活性允许导弹在不同的阶段使用不同的通信模式,比如星型、环形或网状通信,以优化信息传递效率和应对可能的干扰或故障。在切换过程中,导弹系统需要具备一定的自组织能力和容错能力,以确保即使在部分通信链路中断的情况下,攻击计划仍能顺利执行。
该研究的重要贡献在于提出了一种适应性强且可扩展的框架,不仅能够应对多目标环境,还能适应通信条件的变化。它对军事应用具有实际价值,特别是在现代防空和反舰作战中,多枚导弹的协同操作可以显著提高打击精度和生存能力。非线性动力学分析和仿真结果展示了这种策略的有效性和鲁棒性,为未来更高级别的自主武器系统提供了理论基础。
这篇研究论文深入挖掘了分布式导弹系统在复杂任务中的潜在优势,并通过理论建模和实证分析,为多枚导弹在动态环境中进行有效协作提供了实用的指导原则。它为军事技术的发展,尤其是智能武器系统的协同作战策略,开辟了新的研究方向。
2510 Q. Zhao et al.
defense system (i.e., T
2
). Without loss of generality,
suppose that the task assignment has been completed.
Subgroups M
1
and M
2
are expected to attack targets
T
1
and T
2
, respectively. To saturate the defenses and
increase the kill probability, T
2
should first be destroyed
by subgroup M
2
, and then subgroup M
1
attacks T
1
.
Subgroups M
1
and M
2
work in coordination through
local inter-subgroup communications (i.e., information
exchange between different subgroups). In each sub-
group, multiple missiles synchronize the impact time
via local intra-subgroup communications (i.e., infor-
mation exchange within each subgroup). Thus, the
group cooperative attack can be achieved by the whole
multi-missile system.
Remark 1 In contrast to traditional cooperative guid-
ance, in which multiple missiles attack one single target
[12–25], the group cooperative guidance is employed
to intercept multiple targets. In addition, information is
exchanged not only within the same subgroup but also
between different subgroups. If there exist only one
subgroup and one target, then the group cooperative
guidance in the current paper becomes the traditional
one. Therefore, the group cooperative guidance prob-
lem can be treated as an extension of the traditional one
and has more generality.
The following assumptions are standard in studying
group behavior.
Assumption 1 ([30–34]) For all m
i
/∈ M
p
( p ∈
{1, 2,...,s}),
∀m
j
∈M
p
w
ij
= 0.
Assumption 2 ([32,33]) {M
1
, M
2
,...,M
s
} is an
acyclic partition of the missile set M.
Remark 2 Assumption 1 means that the inter-subgroup
communication among different subgroups is either
positively or negatively weighted, as was pointed
out in [31]. The underlying physical meaning of the
inter-subgroup communications which are positively
and negatively weighted is explained as follows: On
the one hand, the positively weighted information
exchange can be viewed as the cooperative effects
among multiple subgroups. On the other hand, the neg-
atively weighted information exchange can be func-
tioned as the asynchronous effects among multiple
subgroups. The cooperative effects and asynchronous
effects ensure that all the subgroups work as a whole
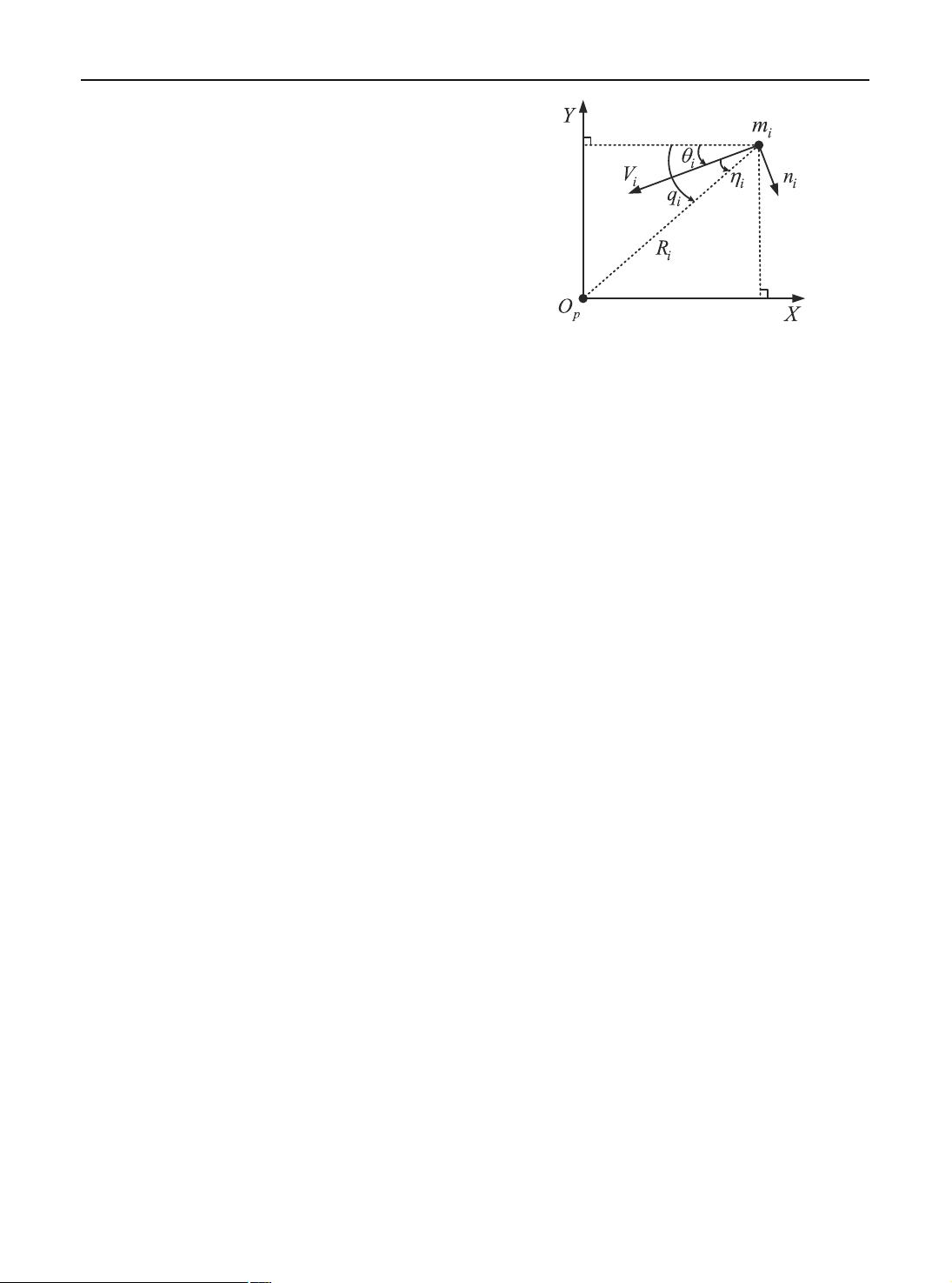
Fig. 2 Guidance geometry of m
i
while attacking the distinct targets. Assumption 1 is
commonly used in investigating the group behavior
problems [30–34].
Remark 3 Assumption 2 means that there exist no
cycles among multiple subgroups. By taking each sub-
group as a node, the information flow among multiple
subgroups can be described by a directed graph with on
cycles. In other words, the communication structure for
multiple subgroups is a leader-following one. This kind
of communication structure is easy for application, as
was mentioned in [35,36].
Lemma 1 ([33]) Based on Assumptions 1 and 2, each
subgroup M
p
contains a spanning tree if and only if
Laplacian matrix L has s simple zero eigenvalues (i.e.,
L has a zero eigenvalue whose algebraic and geometric
multiplicity are both s), and the real part of all the other
(N − s) eigenvalues are positive.
2.2 Problem description
In engineering practice, the trajectory of a missile is
decomposed into motion on lateral and longitudinal
planes. This paper focuses on the lateral plane. The
following is a standard assumption when considering
cooperative guidance problems of multiple missiles
(see, e.g., [13,15,18,19,21–23,26]).
Assumption 3 (i) Both the missiles and the targets are
treated as mass points on the planar surface. (ii) Com-
pared with the guidance loop, the seeker and autopilot
dynamics of missiles are sufficiently fast. (iii) The axis
velocity of each missile is a constant.
The homing guidance geometry is depicted in Fig. 2.
Let m
i
(i ∈{1, 2,...,N }) denote the ith missile and
123
剩余16页未读,继续阅读
2021-04-07 上传
2021-09-13 上传
2021-03-29 上传
2021-03-09 上传
2021-03-14 上传
2021-03-19 上传
2021-03-04 上传
2021-03-26 上传

weixin_38581447
- 粉丝: 8
- 资源: 911
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
