




"Simulink中的PID控制算法与参数整定"
版权申诉
PID控制是一种广泛应用于控制系统中的方法,其基本概念包括比例控制、积分控制和微分控制。在线性连续系统中,PID控制通常由这三种控制方式的组合来实现。比例控制是根据偏差的大小来控制输出的作用;积分控制是根据偏差随时间的累积来控制输出的作用;微分控制是根据偏差在时间上的变化率来控制输出的作用。PID控制器的输出通常表示为一个比例增益乘以偏差、其积分和微分的加权和。PID控制器具有原理简单,使用方便的优点。
PID控制的Simulink仿真.ppt介绍了PID控制的基本概念、算法和参数整定。在这个演示文稿中,作者通过大量的仿真实例来说明PID参数整定的重要性,并帮助读者更全面地了解PID控制的原理和算法。通过仿真实例,读者可以熟练地进行PID参数整定,从而更好地应用PID控制于实际系统中。
在PID控制概述部分,介绍了PID控制的基本概念和优点。PID控制通过比例、积分和微分三种控制方式的组合来实现对系统的控制。比例控制根据偏差的大小进行控制,积分控制根据偏差随时间的累积进行控制,微分控制根据偏差随时间的变化率进行控制。PID控制器简单易懂,易于使用,是控制系统中常用的一种方法。
在PID控制算法部分,介绍了PID控制的具体算法。PID控制器的输出通常表示为比例增益乘以偏差、积分和微分的加权和。根据不同系统的需求,可以通过调整比例增益、积分时间和微分时间来实现PID控制器参数的整定。PID控制算法是控制系统中的基础知识,熟练掌握该算法对系统的稳定性和性能有重要影响。
在PID控制器参数整定部分,介绍了如何通过仿真实例来进行PID控制器参数的整定。通过实例演示,读者可以了解不同参数对系统响应的影响,以及如何通过调整参数来实现系统的稳定性和性能。PID参数整定是PID控制应用中的重要步骤,通过模拟仿真可以帮助工程师更快、更准确地整定PID控制器的参数。
通过本章的学习,读者可以对PID控制的原理、算法和参数整定有一个较为全面的了解,并能够通过仿真实例来熟练应用PID控制于实际系统中。PID控制是一种简单且有效的控制方法,在工业控制系统中得到广泛应用。掌握PID控制的基本概念和操作方法,对于工程师来说是非常重要的。通过不断学习和实践,工程师可以更好地应用PID控制于实际系统中,提高系统的稳定性和性能。
5.2 PID
5.2 PID
控制算法
控制算法
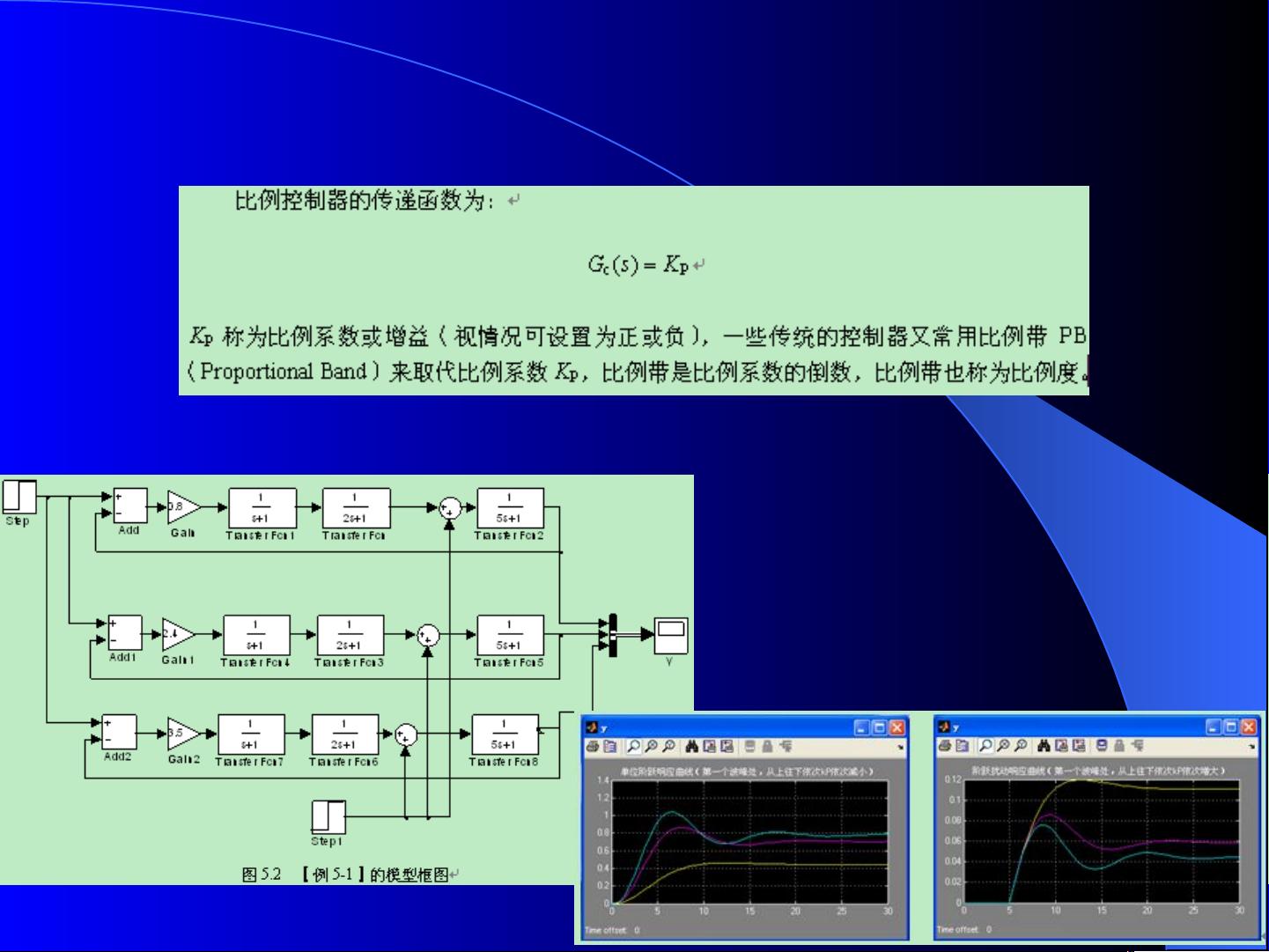
5.2.1 比例( P )控制
纯比例控制的作用和比例调节对系统性能的影响
下载后可阅读完整内容,剩余17页未读,立即下载
相关推荐
147 浏览量
108 浏览量
702 浏览量
2021-12-06 上传
2021-10-01 上传
2021-11-15 上传
2022-06-25 上传
2010-05-01 上传

wdqsv88
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开








最新资源
- WebGL实现简单物理引擎:球体碰撞与墙壁互动
- 雨花石音乐打铃系统v1.2.7功能详解与特别版特点
- 发布真正支持Unicode的MD5版本及其修正
- KindEditor:强大的HTML文本编辑器
- JavaScript实现的打地鼠游戏教程
- 掌握C++编程与多线程处理技术
- 精通LINUX与UNIX SHELL编程技巧与系统管理
- Java开源OA办公系统源码-JeeSite框架分析
- 曹汝成版组合数学答案解析
- Activiti基础教程与完整示例解析
- PHPYou 1.1:美观且功能强大的相册解决方案
- 智能优化算法演示程序集:算法实现指南
- 快速获取Caffe示例所需的ILSVRC12数据集
- WebGL动画样条波创建与实现教程
- SpringCloud中的Ribbon实现服务消费者负载均衡
- Java程序性能优化技巧与实践分享






















