FANUC CRX协作机器人开机与示教器初始化教程
版权申诉
3 浏览量
更新于2024-07-08
1
收藏 4.12MB DOCX 举报
"FANUC机器人_CRX协作机器人的开机和示教器的初始化设置基本步骤"
FANUC的CRX协作机器人是一款先进的自动化设备,专为安全与高效的人机协作而设计。在开始使用该机器人之前,必须正确地进行开机和示教器的初始化设置。以下是一份详细的步骤指南:
1. 开机步骤:
- 首先,确保控制柜的断路器已切换至“ON”位置,这将为控制柜供电。
- 接着,按住平板电脑右上方的按钮,启动平板电脑。解锁屏幕通常是通过从底部向上滑动来实现的。
2. 打开示教器:
- 在平板的应用程序界面上找到并打开FANUC平板示教器的APP。
3. 初始化设置:
- 当机器人首次通电,示教器会显示初始设置向导。按“NEXT”键继续。
- 根据向导,设置地区、时区、时间及日期。
- 对于网络设置,可以先选择“无网络接入”,后续可根据需求更改。
- 完成所有设置后,点击“FINISH”以结束初始化过程。
4. DCS密码与负载确认:
- 可能需要输入DCS密码,这里默认的主密码是1111。
- 系统会询问是否确认当前的有效负载,如果负载为0Kg且没有外力附加,选择“是”。
5. 示教器功能:
- 【TPEnable】按钮用于启用或禁用示教器。
- 程序编辑可以通过下拉菜单进行。
- 报警信息会在提示栏显示,消除原因后,通过“RESET”键清除。
- 机器人视图实时反映姿态和程序信息。
- 运行面板控制程序的启动、暂停和单步执行,操作面板则用于点动和手动牵引。
6. 手动操作模式:
- 手动引导示教:允许通过直接拖拽机器人来教学路径。
- JOG点动模式:通过平板上的按钮精确控制机器人的移动。
手动引导示教模式的具体步骤包括:
- 点击右下角的“Robot operation”按钮。
- 如果处于“JOG”模式,选择左边的“手动指导教学”标签。
- 设置合适的示教力量,以确保安全拖拽。
以上就是FANUC CRX协作机器人开机及示教器初始化的基本流程。理解并熟练掌握这些步骤对于有效地使用和编程机器人至关重要,确保了作业的安全性和效率。后续的学习中,将进一步探讨如何运用这些知识进行更复杂的任务操作。
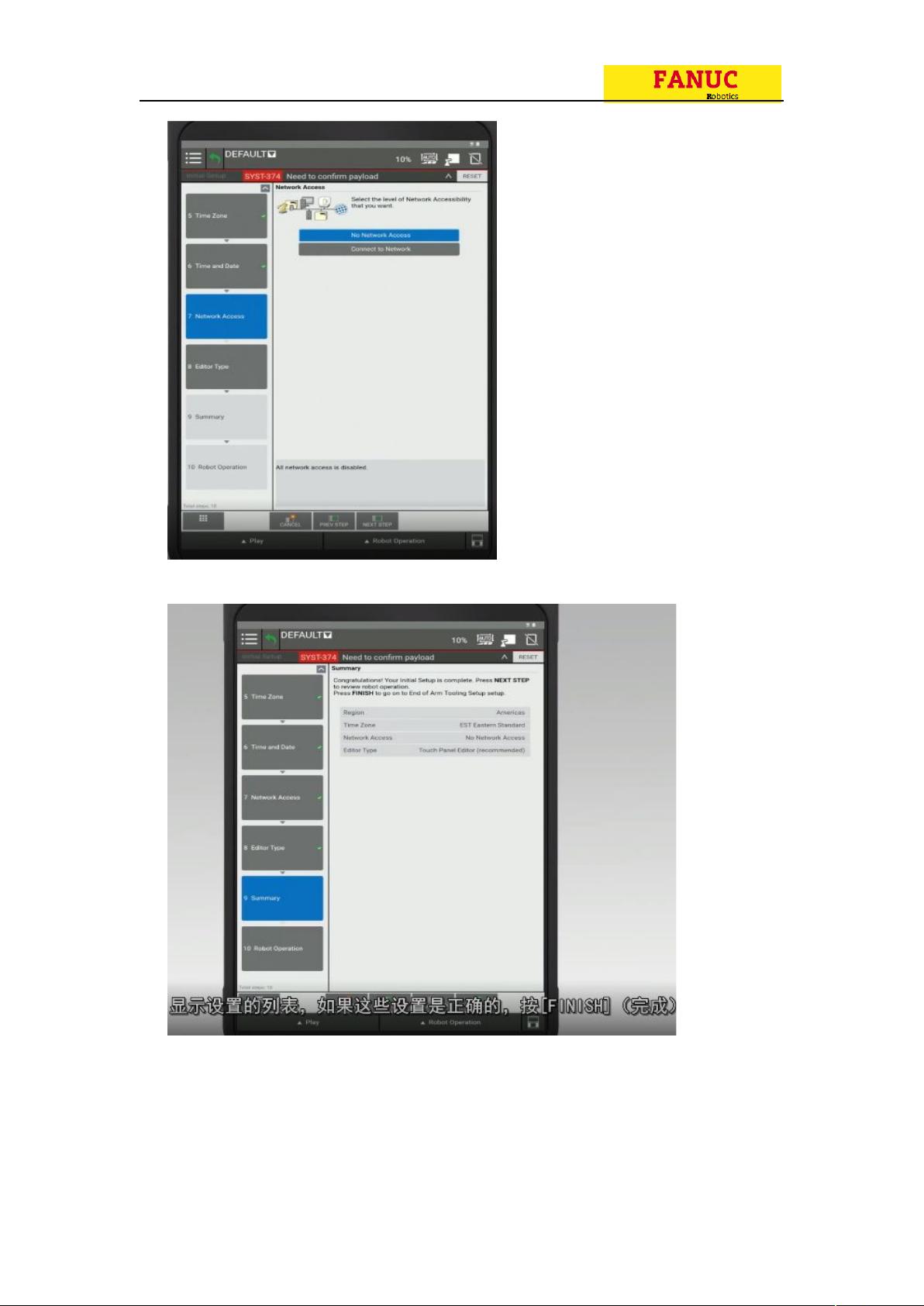
7. 最后,显示设置的列表,没问题的话,点击“FINISH”完成。
8. 完成初始化设置,将出现以下画面,
剩余16页未读,继续阅读
2020-11-21 上传
2021-11-13 上传
2022-02-11 上传
2022-06-03 上传
2021-01-28 上传
2022-09-19 上传

AAA_自动化工程师
- 粉丝: 6999
- 资源: 3440
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
