MATLAB与ADAMS联合仿真的步骤详解:构建与通信
需积分: 9 88 浏览量
更新于2024-09-05
1
收藏 1000KB DOCX 举报
本文档主要介绍了MATLAB与ADAMS2013软件的联合仿真过程,以实现机械模型的动力学分析。首先,用户需要创建一个名为"MODEL_Co_Simulation"的基本模型,并在这个模型中添加一个零件PART_2和一个转动约束JOINT_1,以及与其关联的运动驱动力MOTION_1。在MATLAB中,创建了两个变量VARIABLE_Part2_cm和VARIABLE_motion1,其中VARIABLE_Part2_cm用于存储PART_2质心点的X坐标信息,而VARIABLE_motion1则作为一个接口,将MATLAB中的数据传递给ADAMS。
在ADAMS中,用户通过"Plugins"菜单下的"PlantExport"功能来配置控制模块,确保MATLAB作为目标软件。设置好输入变量VARIABLE_Part2_cm的映射后,会在工程目录下生成相应的控制模块文件。在MATLAB端,用户通过调用这些文件(如Control_Plant_3),并通过adams_sys命令启动仿真。
接下来,用户将ADAMS子系统(ADAMS_sub)集成到Simulink环境中,确保仿真步长的一致性,这可以通过调整Simulink中的时间步长来实现。在仿真过程中,输入部分被设定为正弦信号,输出则是通过VARIABLE_Part2_cm获取的PART_2质心的X坐标值。
总结来说,这份文档提供了从构建模型、设置变量传递、配置ADAMS与Simulink接口,到实际运行联合仿真的详细步骤,适用于需要在MATLAB和ADAMS之间进行交互的工程师,以便于验证和优化机械系统的动态性能。这种联合仿真方法对于复杂系统的设计和分析具有很高的实用价值。
1.建立一个简单的模型 MODEL_Co_Simulaon,创建一个构件 PART_2,创建一个转动约束
JOINT_1,给转动约束一个驱动 MOTION_1
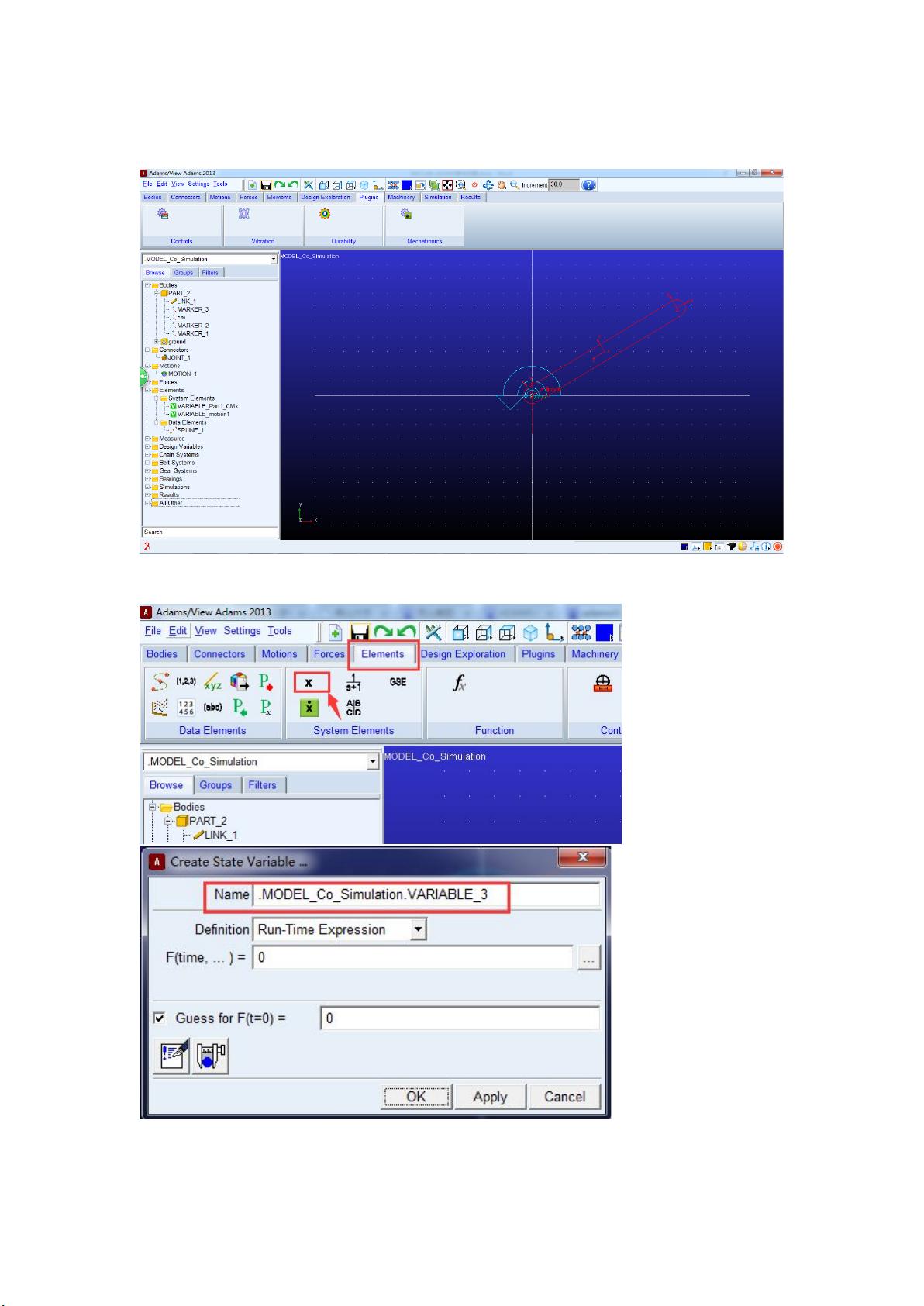
2.创建两个变量 VARIABLE_PART2_CMx 和变量 VARIABLE_moon1
创建变量如下:
命名好名字点击 OK 则生成两个变量如图:
下载后可阅读完整内容,剩余7页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-12-12 上传
267 浏览量
2022-11-02 上传
256 浏览量
402 浏览量
267 浏览量

David_By
- 粉丝: 147
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多媒体文件添加技巧:网页制作第七课
- 达内技术实现的当当网购物商城项目教程
- 手机端抓包工具LR_03105_Patch4更新包发布
- 佩特里琴科JavaScript课程要点解析
- Windows下XAMPP与TestLink的安装与配置教程
- JavaScript实现Cron定时任务功能
- WebXR体验演示及开发教程:入门指南
- STM32-F0/F1/F2系列IIC主机压缩包教程
- DirectX Repair V3.3:系统修复工具的全面解决方案
- johnflanigan.github.io网站HTML解析
- 打造个性化Discuz!X2.5首页:多格布局、视频与微博集成
- 下载apache-maven-2.2.1.zip,体验高效项目管理
- PPT图标素材库:打造精美演示文稿
- 2key-ratchet:在TypeScript中实现Double Ratchet和X3DH协议
- Delphi初学者必看:简易计算器小程序制作教程
- LIGHTECH运动控制库:综合电子技术解决方案
